The idea of this project is to create an autonomous pick and place robot. This robot will do its movement through line follower robot using IR sensors. The main function of this robot is to pick an object and place it on a desired place, it will select its destination through QR code scanning e.g. there’s a box at X place and a rack at Y place, the robot will scan the QR code of the box at X place. After scanning, next step will be the selection of placing the carried object; robot will select its dropping place after going through the program designed in it using Arduino. Now that our path and dropping place has been selected, object will be placed at Y place as the scanned box belongs to it.
Project Proposal
1. High-level project introduction and performance expectation
The idea of this project is to create an autonomous pick and place robot. This robot will do its movement through image processing using IR sensors and camera. The main function of this robot is to pick an object and place it on a desired place, it will select its destination through Image processing i.e there’s a box at X place and a rack at Y place, the robot will detect the object at X place. After scanning, next step will be the selection of path and placing the carried object robot will select its dropping place after going through the program designed in it using FPGA controller as it needs a lot of processing speed which any other processor could not handle. Now that our path and dropping place has been selected, object will be placed at Y place as the scanned box belongs to it.
It has application scope in picking and setting the items in distribution centres, enterprises and can even be utilized in workplaces. Rather than utilizing work to empty the trucks or compartments, this robot can undoubtedly be introduced and utilized as it conveys the desired object in a more sensitive manner than the laborers. It is an autonomous robot so it does not need any information or input from the users that means we will require less labour and money will be saved and it also will be much more efficient than the physical labour. It will likewise save the time.
The target user is basically the industries with warehouses and offices, it is mainly used for picking, detecting the place and then placing the object. So, it can also be used in electronic labs.
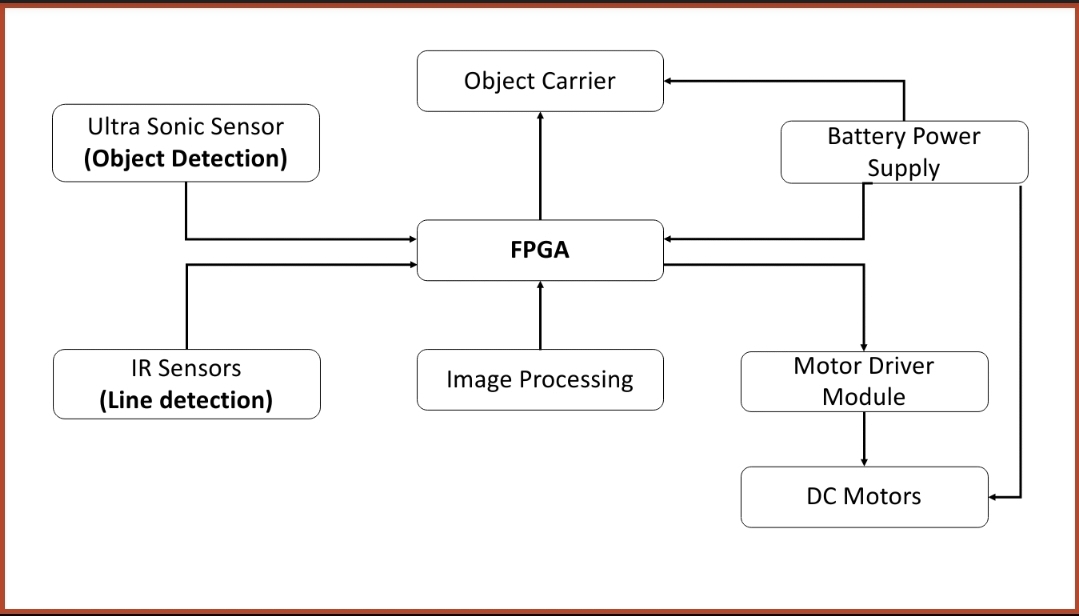
2. Block Diagram
Block Diagram:
3. Expected sustainability results, projected resource savings
The parameters to be reached by the project are such as:
- It carries the objects and drops it to its destination effectively through image processing.
- It places the object even at a certain height.
- It can carry weight around 2KG.
- As it is based on autonomous system, it does not need any commands or inputs to work. So, the movement of the device is done by keeping under consideration that the carrier is always facing the place where the object is needed to be picked. It means that either gears or movement of the carrier is there.
- The vehicle will move through line following and it will pick and place the object to its desired place
- The vehicle will also be able to detect the obstacles that come between the path and it will stop when anything comes between.
0 Comments
Please login to post a comment.