Our team introduces an automatic classification system for wastes.
If garbage is not classified, it can cause environmental problems, and if it is classified well, resources can be saved through recycling.
Our system can classify not only good-conditioned garbage (plastic, cans, bottles, etc.), but also bad-conditioned garbage.
Project Proposal
1. High-level project introduction and performance expectation
purpose of the design
The purpose of recycling is to reuse the resources that have already been used, and it is the easiest way for the general public to save resources, and the increase in recycling is directly related to resource saving. However, the reason why recycling rates are low in many countries is that many people feel lazy or not necessary to recycle.
Our team focuses on how garbage can be classified well when the general public throws it away in residential facilities before garbage is collected in the garbage classification workshop. The recycling system in Korea takes three major steps.
The first step is to collect garbage from residential facilities. The second step is to select the collected garbage. The third step is to recycle or incinerate the selected waste. Recycling systems in other countries are not very different. The problem here is that the recycling rate decreases at the second step.
The first reason is to come to the workplace in a state where garbage is not properly classified during the collection stage. The second reason is that garbage is collected in contaminated conditions. The second reason, even if we classify these contaminated wastes, we can't clean each of them, so our team focuses on solving the problem of poor classification of garbage in the first reason, the collection stage. Therefore, our team's final goal is to increase the recycling rate by introducing a waste classification system in residential facilities.
The big stages of our project are as follows.
Place a box with a very wide floor for receiving trash brought by people in front of the robot arm and camera. Since garbage may overlap in layers and cannot be recognized, we are also considering a device that shakes the box when garbage is recognized to check the accuracy of garbage recognition and spread garbage if necessary. When the trash is sorted in the box, AI, which has learned the type of garbage through deep learning, classifies the trash that comes through the camera according to cans, plastics, and bottles.
In some cases, recycling is thrown away in a bad condition, so our project will cassify not only trash in good condition in terms of classification of garbage, but also garbage in bad condition, such as crushed cans, crumpled plastics, and broken bottles.
application scope, and targeted users
Object classification consists of three types: glass bottles, cans, and plastics.
According to the Ministry of Environment of Korea, glass bottles have a higher reuse rate than other items and can be recycled as they are with little loss of glass quality, so they can be recycled repeatedly and the average number of times they are reused is about 20.
When cans are recycled, they have a wide range of reproduction, such as rebars and automobile parts. Also, can recycling is very effective in saving energy. According to KORA(Korea Resource Circulation Service Agency), recycling one iron can saves electricity to turn on the incandescent bulb for about two hours, and recycling one aluminum can saves electricity to use the incandescent bulb for about 27 hours.
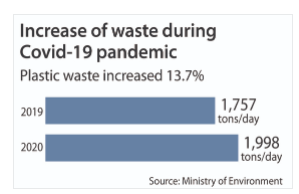
Plastic has recently increased due to the increase in single-person households and the coronavirus. (According to the Ministry of Environment, plastic usage increased by 13.7% in 2020 compared to 2019) Among the types of plastic, PET, PP, and PS are recyclable and discharged a lot from residential facilities, so PET, PP, and PS were selected as plastic classification items in the proposed system. (PP: Delivery Container, PS: Disposable Spoon Fork, PET: Pet Bottle)
detailed description of why we used Intel FPGA devices to do the design
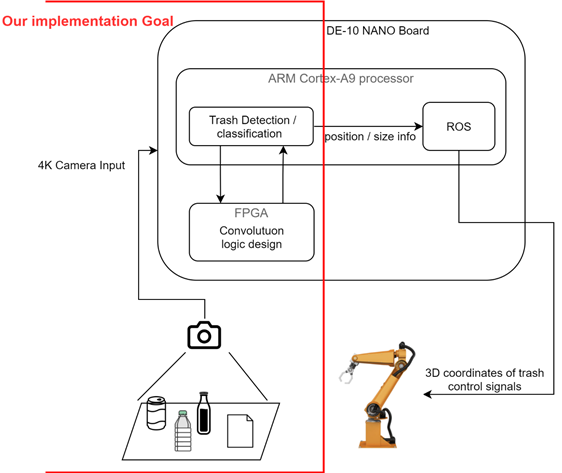
We will use the YOLO object detection framework in the Ubuntu operating system for object detection and classification, which is the main function of the system proposed by our team. Since YOLO is a CNN-based object detector, a lot of convolution operations are performed when detecting objects. This can contribute to improving the performance of our project by implementing major functions such as detection and classification in the HPS part of the Intel FPGA board and accelerating the convolution operation in the detection stage through custom logic design in the FPGA part.
The main advantage of the FPGA is that the latency is low compared to the GPU, and the power consumption is also lower when performing the operation.In addition, FPGA can accelerate and speed up the aforementioned convolution operation, so the use of FPGA will have a great advantage in meeting the requirements of real-time for the image process.
reference:
https://www.kora.or.kr/materials.do
Global recycling rate from resource Magazine: Recycling: Who really leads the world? | Resource Magazine
https://www.dbpia.co.kr/Journal/articleDetail?nodeId=NODE09365970
Waste and Recycling Status of Europe, Japan and USA 2021 Sang-hun LEE* and § Kyoungkeun YOO(https://j-kirr.or.kr/articles/pdf/WDRA/kirr-2021-030-01-0.pdf)
2. Block Diagram
3. Expected sustainability results, projected resource savings
According to a paper published at a university in Korea, even if the recycling rate of plastic, cans, and glass is increased by only 1%, it has an economic effect of saving 63.9 billion won per year. (about $70 million) If the arms of the automatic classification robot developed by us spread globally beyond Korea, it could provide economic savings to each country.
The greatest environmental resource effect obtained from recycling is the reduction in landfills and the reduction in carbon dioxide emissions. According to the Ministry of Environment, when 1 kg of pet bottles is recycled and recovered, the landfill amount can be reduced by 0.04 kg and carbon dioxide emissions by 3.6 kg. cans and bottles can reduce 0.96kg of carbon dioxide, 0.046kg of carbon dioxide, and 8.4kg of carbon dioxide, respectively. Along with these environmental problems, it is expected that the amount of water sent into the sea and incinerated will have the effect of reducing pollution of land, water quality, and air quality.
It can also reduce the effort and time people directly classify garbage. The higher the accuracy of our project's waste classification, the less waste that people who classify the waste in the factory directly classify, and the less time and trouble it takes.
reference:
Characteristics of Municipal Waste Generated as a Source of SRF (Solid Refuse Fuel) from D Metropolitan City (http://journal.kswm.or.kr/past/view.asp?a_key=3652953)
4. Design Introduction
5. Functional description and implementation
6. Performance metrics, performance to expectation
7. Sustainability results, resource savings achieved
8. Conclusion
0 Comments
Please login to post a comment.