In this project, we aim to develop a blind spot detection system. In scenarios where vehicles are navigating sharp turns or bends, the area alongside and just behind the vehicle is a constant source of danger and often the cause of serious accidents. To make navigation easier in such scenarios, blind spot detection can be used to warn drivers of impending collisions. In the proposed system, ultrasonic sensors or lidars will be used for blind spot detection.
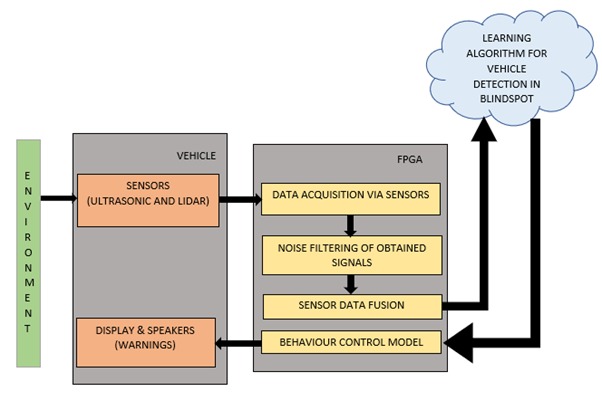
Sensor data will be acquired by a custom data acquisition system implemented on the FPGA. Sensor noise filtering and basic sensor data fusion will be performed using the ARM Cortex 9 Processor provided on the FPGA. A behaviour control model will be designed and implemented on the FPGA which will be interfaced with the display system on the vehicle and the speakers. If the driver fails to spot objects or vehicles in the blind spot while turning, or fails to detect adjacent vehicle lane changes in its vicinity, this behaviour model will trigger visual and audio warnings.
Sensor data will be uploaded to the cloud using Microsoft Azure. On the cloud, a learning algorithm will be developed which generates the possible trajectories of vehicles in the blind spot and provides the necessary warning signals back to the FPGA mounted in the vehicle.
Project Proposal
1. High-level project introduction and performance expectation
Introduction:
The core competencies of an intelligent vehicle control and coordination system can be broadly classified into perception, planning and control. Perception refers to the ability of an intelligent vehicular system to collect information from sensors and develop a contextual understanding of its environment, such as where obstacles are located, detection of road signs and markings, and categorising sensor data by their semantic meaning. Planning refers to the process of making purposeful decisions in order to navigate the vehicle safely. Control competency refers to the vehicle’s ability to execute the planned sequence of actions.
While navigating a vehicle through sharp turns and bends, the area behind and alongside the vehicle must be clear of any obstacles. These areas which can’t be directly seen outside the windscreen or by the rear view and side mirrors are called blind spots. Each year, hundreds of thousands of accidents take place involving blind spots.
By installing ultrasonic sensors and lidars to monitor blind spot areas, drivers can be warned about impending collisions via visual triggers and audio warnings. Sensor data will be acquired by a custom data acquisition system implemented on the FPGA. Sensor noise filtering and basic sensor data fusion will be performed using the ARM Cortex 9 Processor provided on the FPGA.
This sensor data will be uploaded to the cloud using Microsoft Azure. On the cloud, a learning algorithm will be developed which generates the possible trajectories of vehicles in the blind spot and provides the necessary warning signals back to the FPGA mounted in the vehicle.
Purpose and Application:
While navigating a vehicle through sharp turns and bends, the area behind and alongside the vehicle must be clear of any obstacles. These areas which can’t be directly seen outside the windscreen or by the rear view and side mirrors are called blind spots. We aim to develop a blind spot detection system, which warns drivers about impending collisions which may occur due to objects or other vehicles in the blind spot areas using visual and auditory warnings.
Applications of the project include:
- Warns drivers about collisions in the blind spots
- Navigating sharp turns and bends is made easier
- Blind spot detection while unparking vehicles
- While overtaking at high speeds
Targeted Users:
This application can help the following groups of people:
- Drivers who drive on highway
- City drivers and Valets in the parking lots
- Heavy vehicle drivers
- Beginner drivers who require a sense of spatial awareness
Why Intel FPGAs?
In our project, we deal with sensor data and it’s processing. Sensor data is to be uploaded to the cloud, where learning algorithms are implemented. FPGAs are advantageous for the following reasons.
- Sensor noise filtering and basic sensor data fusion will be performed using the ARM Cortex 9 Processor provided on the FPGA.
- For the project, a custom data acquisition system needs to be implemented on the FPGA.
- Tasks such as blind spot detection require systems to work fast and be accurate. FPGAs have the ability to parallelise tasks and this helps in performing tasks faster.
2. Block Diagram
3. Expected sustainability results, projected resource savings
Expected sustainability:
The design should be able to use sensor data acquired by a custom data acquisition system implemented on the FPGA. Sensor noise filtering and basic sensor data fusion are to be performed using the ARM Cortex 9 Processor provided on the FPGA. If the driver fails to spot objects or vehicles in the blind spot while turning, or fails to detect adjacent vehicle lane changes in its vicinity, the behavioural control model implemented on the FPGA which is interfaced with the display system and speakers on the vehicle, will give rise to visual and auditory warnings. A learning algorithm is developed on the cloud which generates the possible trajectories of vehicles in the blind spot and provides the necessary warning signals back to the FPGA mounted in the vehicle.
4. Design Introduction
5. Functional description and implementation
6. Performance metrics, performance to expectation
7. Sustainability results, resource savings achieved
8. Conclusion
0 Comments
Please login to post a comment.