There are many hazardous tasks that human needs to perform and they are dangerous to do by oneself. our product allows the user to control a robotic gripper arm through kinect sensor, which provides better control and more freedom to the user in a real time environment. This allow us humans to complete these risky operations without endangering ourselves. We designed this project to be helpful in both industrial and medical fields. The idea of the project is to design a robotic gripper arm which is controlled through gestures. The robotic arm will be controlled through a Kinect sensor connected to a PC. The robotic structure will mirror the hand and elbow movements of an actual arm as captured by the Kinect sensor.The goal of the project is to create a robot arm that fully replicates the movement of another hand and arm, and can help one remotely grip and lift an object. In this project, real-time interaction among environment, man, and machine is developed through the machine vision system and the robotic arm.
Project Proposal
1. High-level project introduction and performance expectation
The idea of the project is to design a robotic gripper arm which is controlled through gestures. The robotic arm will be controlled through a Kinect sensor connected to a PC. The robotic structure will mimic the hand and elbow movements of an actual arm as captured by the Kinect sensor. It will also have a firm grip and will be able to grip and lift moderately heavy objects.
The Purpose of the project is to create a robot arm that can help one remotely grip and lift a specific object (ball). In this project, real-time interaction among environment, man, and machine is developed through the machine vision system and the robotic arm.
APPLICATIONS:
- Industries/fields where manual labor is needed in harsh conditions.
- Use in medical field to perform surgeries with a smaller sized actuator.
- The differently-abled and handicapped can benefit from gesture recognition by eliminating a large amount of physical work.
We use FGPA device because it can be reprogrammed to desired application after manufacturing and it will provide us with a faster response time in the various movements of robotic arm.
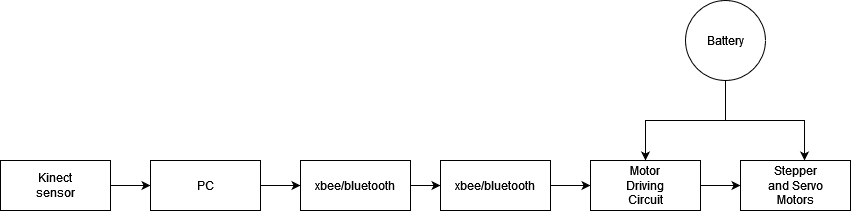
2. Block Diagram
3. Expected sustainability results, projected resource savings
The objective is to design a device that replicates the actions of another hand and arm (up to the elbow) and also has a firm grip along with a fair lifting capability. The performance parameters that our design needs to reach are:
- Proper control of robotic structure based on input values.
- Integration of motors in robotic arm structure.
- Movement of joints and effective gripping of robotic hand.
- Accurate arm/finger detection using Kinect sensor.
4. Design Introduction
The idea of the project is to design a robotic gripper arm which is controlled through gestures. The robotic arm will be controlled through a Kinect sensor connected to a PC. The robotic structure will mimic the hand and elbow movements of an actual arm as captured by the Kinect sensor. It will also have a firm grip and will be able to grip and lift moderately heavy objects.
The Purpose of the project is to create a robot arm that can help one remotely grip and lift a specific object (ball). In this project, real-time interaction among environment, man, and machine is developed through the machine vision system and the robotic arm.
APPLICATIONS:
- Industries/fields where manual labor is needed in harsh conditions.
- Use in medical field to perform surgeries with a smaller sized actuator.
- The differently-abled and handicapped can benefit from gesture recognition by eliminating a large amount of physical work.
We use FGPA device because it ca reprogrammed to desired application after manufacturing.
5. Functional description and implementation
In this project, we propose a system that controls the robotic arm remotely by sending human gestures. The gesture movement of hand is captured through kinect sensor, which analyzes the movement of actual arm. This image is processed in PC by lab view software and sends information via Bluetooth module. Power supply is given to motor driving circuit and motors. Motor driver circuit controls the movement of motors which moves the robotic arm as the movement of actual arm.
6. Performance metrics, performance to expectation
The objective is to design a device that replicates the actions of another hand and arm (up to the elbow) and also has a firm grip along with a fair lifting capability. The performance parameters that our design needs to reach are:
- Proper control of robotic structure based on input values.
- Integration of motors in robotic arm structure.
- Movement of joints and effective gripping of robotic hand.
- Accurate arm/finger detection using Kinect sensor.
These parameters must be met by our design for it to be successful.
7. Sustainability results, resource savings achieved
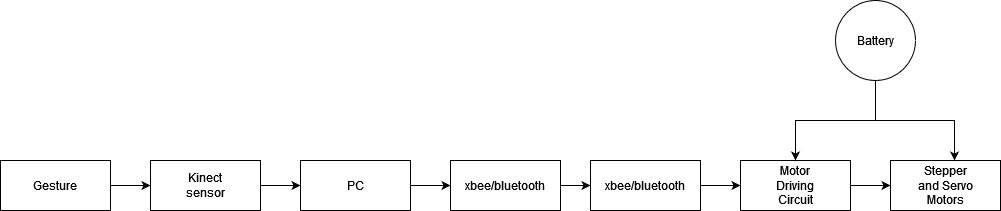
A gesture will be made by user which the kinect sensor will track. Then it will be sent to pc to be analyzed/processed and sent wirelessly to the motor driving circuit which controls the movement of the motors. This will help to replicate the movement given as input at the output as movement in robotic arm.
8. Conclusion
0 Comments
Please login to post a comment.