
Plants are considered as one of the greatest assets in the field of Indian science of medicine called Ayurveda.Some plants have it's medicinal values apart from serving as the source of food.The innovation in the allopathic medicines has degraded the significance of these therapeutic plants. People fail to have their medication at their doorstep instead went behind the fastest cure unaware of its side effects.
The main reasons are extinction of medicinal plants and lack of knowledge about identifying medicinal plants among the normal one's.Plant from the basis of Ayurveda and today's modern day medicines are great source of income.Due to cutting of forests,lot of medicinal plants have almost become extinct.Because of Ecosystem is the major part of Biodiversity,Where plants plays a crucial role. So we have to replant the extincting medicinal plants to improve our Ecosystem And to do not disturb Biodiversity.
So there is an immediate need for us to identify medicinal plants and replant them for next generations.Medicinal plants identification by manually means often leads to incorrect identification.
This project aims at implementing a System which can be able to identify some medicinal plants and Plucking of plants if they are medicinal.
Demo Video
Project Proposal
1. High-level project introduction and performance expectation
Mother earth is enriched and nourished with a variety of plants.These plants are useful in many ways such as drug formulation,production of herbal products, and medicines to cure many common ailments and diseases. For the past 5000 years, Ayurveda, a traditional Indian medicinal system, is widely accepted even today.India is a rich country for being the habitat for a variety of medicinal plants.Many parts of the plants such as leaves, bark, root, seeds, fruits, and many more are used as a vital ingredient for the production of herbal medicines.
Herbal medicines are preferred in both developing and developed countries as an alternative to synthetic drugs mainly because of no side effects.Unfortunately, medicinal plants are becoming extinct because of a variety of factors.To replant medical plants for a better future, we must first distinguish medicinal plants from non-medicinal ones. However, identifying these plants by human sight is difficult, time-consuming, and inaccurate.
So, in order to tackle this issue, we intend to design a bot that can detectmedicinal plants and pluck them if they are medicinal.Our bot's major functions are data gathering, data processing, and then regulating based on the processor's output.
1.DATA COLLECTION:
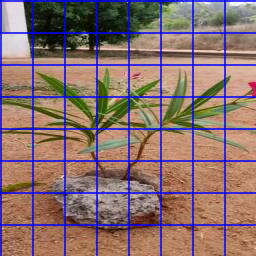
In order to collect data, we must first identify the plant.To do so, we'll set up a camera to detect the plant.Following detection, the bot will compute the distance between the system and the plant using an ultrasonic sensor.Then, with the use of motors, we'll be able to move our bot closer to the factory.After that, we'll set up a camera with the ability to rotate.The camera will catch the plant's leaf after it has arrived at the plant.In this approach, the data collection process will be completed.
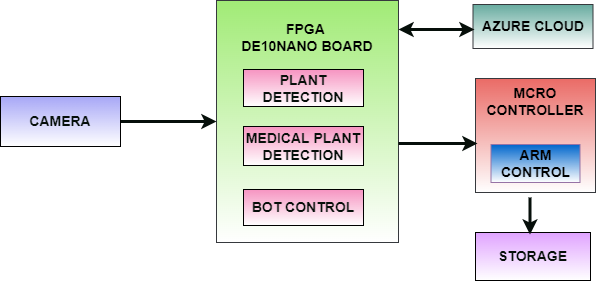
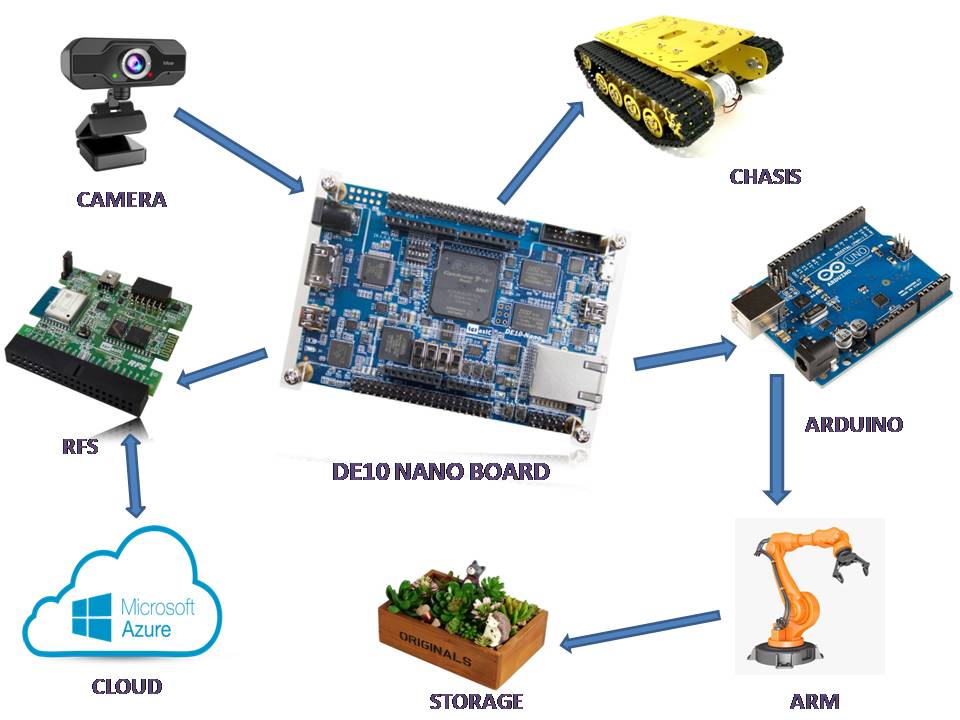
2. Block Diagram
System Flow Graph:
3. Expected sustainability results, projected resource savings
1.Biodiversity will be protected through this effort by transplanting medicinal plants.
2.Medicine will be more readily available.
3.We will grow economically as a result of this endeavour, as medications are a significant source of revenue.
4.This project makes it simple for humans to identify medicinal plants.
4. Design Introduction
4.1 Purpose of the Design:
With the current FPGA technology, this design focuses on the concept of medicinal plant plucker, which plucks the medicinal plants and conserves them by replanting thereafter. The main goal of this design is to provide Ayurvedic medicines that are free from side effects. This project aids in the provision of natural medication. Human health on the other hand, deteriorating as time goes, as a result, this project benefits in improving the health of future generations. We also trained our prototype to detect and pick particular medical plants. Additionally, if we train our prototype on various plants, it will pluck the medical plants on which it trained. With adequate improvements to our prototype, the same proposed system will work properly for weed detection and removal from crops, as well as wastage detection and segregation, and picking the wastage etc.
4.2 Design Components:
1.Logitech USB camera
2.DE10 Nano FPGA Board
3.Arduino Uno
4.Motor Driver BTS7960
4.3 Design Approach:
Bot motion control is entirly depend on the output of the Processing block.Motion of the bot can done by receiving control signals from processing block.The processing part consists of Plant detection, Object Detection and bot control based on computer vision for plant.For computer vision we used LOGITECH USB CAMERA.Based on the camera view of plant position the processor sends signals to Motor Driver.Motor Driver sends the control signals for movement of the wheel.For bot movement we use JHONSON MOTOR for each wheel.Based on the processor output of medicinal plant detection the ARM of the bot can be moved.To run the ARM part of the bot we use MG996 servo motors.To provide suply for our system we used 12v Battery.
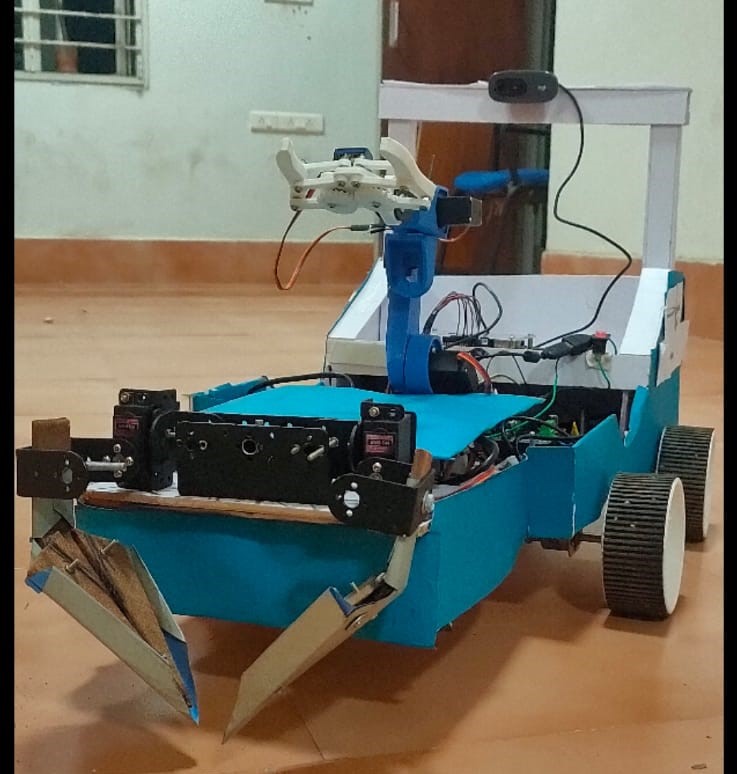
This Is Our final prototype Medicinal Plant Plucker.
And we design Our prototype such that it can detect 4 particular plants, Those are CALOTROPIS, AZADIRACHTA INDICA, OLEANDER and FICUS RELIGIOSA. If time permits we also improve our Prototype such that it can detect any extincting plant species by training it.
5. Functional description and implementation
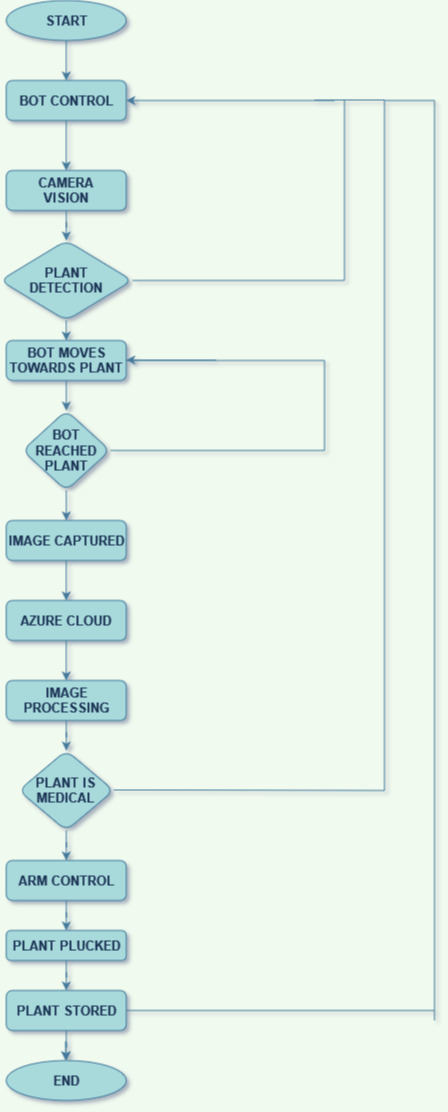
Flow chart of Medicinal Plant Plucker Design
The three main tasks of our bot is,
1. Plant Detection
2. Medical Plant Detection
3. Robot Control
5.1 Plant Detection:
Plant Detection is a computer technology related to computer vision, Image Processing and Deep Learning that deals with detecting instances of plants in images and videos. We managed to train our plant detection model with Haar Cascaded algorithm and deployed it on the FPGA itself.
Haar Cascade classifiers are an effective way for object detection. Haar Cascade is a machine learning-based approach where a lot of positive and negative images are used to train the classifier.
Positive images – These images contain the images which we want our classifier to identify.
Negative Images – Images of everything else, which do not contain the object we want to detect.
5.2 Medical Plant Detection :
We used YOLO (You Only Look Once) Algorithm which uses Deep Learning for image processing. YOLO is an algorithm that uses Convolution Neural Networks (CNNs) to provide real-time object detection. This algorithm is popular because of its speed and accuracy. The trained model for medicinal plant detection is deployed in the Azure Cloud and the FPGA sends the plant image to cloud and receives its prediction through a server created, which is further passed to robot to perform plucking operation.
YOLO algorithm is important because of the following reasons:
Speed: This algorithm improves the speed of detection because it can predict objects in real-time.
High accuracy: YOLO is a predictive technique that provides accurate results with minimal background errors.
Learning capabilities: The algorithm has excellent learning capabilities that enable it to learn the representations of objects and apply them in object detection.
YOLO algorithm works using the following three techniques:
⦁ Residual blocks
⦁ Bounding box regression
⦁ Intersection Over Union (IOU)
5.2.1 Residual Blocks:
First, the image is divided into various grids. Each grid has a dimension of N x N. The following image shows how an input image is divided into grids.
In the image above, there are many grid cells of equal dimension. Every grid cell will detect objects that appear within them. For example, if an object center appears within a certain grid cell, then this cell will be responsible for detecting it.
5.2.2 Bounding Box Regression :
A bounding box is an outline that highlights an object in an image. Every bounding box in the image consists of the following attributes:
⦁ Width (bw)
⦁ Height (bh)
⦁ Class (for example,medicinal plants like Azadiractha Indica, Calotropis etc)
⦁ Bounding box center (bx,by)
⦁ The following image shows an example of a bounding box.
⦁ The bounding box has been represented by a yellow outline.

YOLO uses a single bounding box regression to predict the height, width, center, and class of objects. In the image above, represents the probability of an object appearing in the bounding box.
5.2.3 Intersection over union (IOU):
Intersection over union (IOU) is a phenomenon in object detection that describes how boxes overlap. YOLO uses IOU to provide an output box that surrounds the objects perfectly. Each grid cell is responsible for predicting the bounding boxes and their confidence scores. The IOU is equal to 1 if the predicted bounding box is the same as the real box. This mechanism eliminates bounding boxes that are not equal to the real box.
The following image provides a simple example of how IOU works. In the image above, there are two bounding boxes, one in green and the other one in blue. The blue box is the predicted box while the green box is the real box. YOLO ensures that the two bounding boxes are equal.
.
Intersection over union ensures that the predicted bounding boxes are equal to the real boxes of the objects. This phenomenon eliminates unnecessary bounding boxes that do not meet the characteristics of the objects (like height and width).
5.3 ROBOT CONTROL :
The robot control consists of two parts bot control and plucking arm control. We built a custom 4 wheel chassis for the bot. The wheels are driven by the motor drivers which are controlled autonomously using the DE10Nano.This control is followed by the plant detection model and the commands it returns. The plucking arm is a 3-D printed arm which we modelled as per our requirement. The arm consists 3 links and connected by two fixed joints and one of them is at base (i.e., on the chassis).And the whole arm contains 6 degrees of freedom in 3 dimensional space. The arm is controlled by servo motors for its movement which is operated by Arduino. This arm receives it’s commands from DE10Nano whether to pluck the plant or not. And if the plant is detected the plucking operation is done, if not the robot find it’s way to detect other plants.
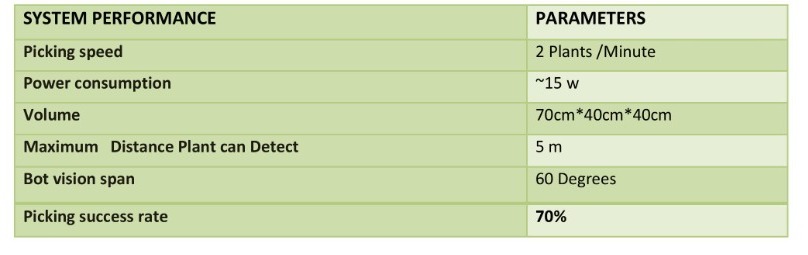
6. Performance metrics, performance to expectation
7. Sustainability results, resource savings achieved
The medical plant detecting system detects the plants and thereby detects Medicinal plants. If the detected plant is medicinal plant, the system sends signal to the bot for motor control to move the bot and then to pluck that plant. This design is expected to last very long on the field because it is planned to get its power from the local grid also Intel FPGA devices are used to make the system even more durable and fast processing. For this project, it is given importance to the processing part because to Machine learning algorithms needs a good processor to process the algorithms.
8. Conclusion
We have implimented reliable and efficient real type prototype for medicinal plant plucker with features of plant detection,medicinal plant classification and autonomous control over bot and it also specified as moving object follower.Our system accurately takes quick decisions in accordance with the surrounding Plants.Our prototype will successfully satisfies our aim which is replanting the any type of medicinal plants in the same manner.
0 Comments
Please login to post a comment.