Road accidents have been very common in the present world, with the prime cause being careless driving and exceeding the speed limit. The necessity to check this has been very essential and different methods have been used so far. However, with the advancement in technology, different governing bodies are demanding some sort of computerised technology to control this problem of overspeed driving. Although all highways do have signboards indicating the maximum speed limit for the sake of the driver’s safety, people still do not obey the highway speed limit.
In this project, the speed of the vehicle is controlled through a continuous scanning of the signboards indicating the maximum speed limit on the roads and locking the maximum speed of the vehicle to the scanned value. By making use of a camera mounted to the vehicle pointing towards the left side of the road, the signboard image is captured. The camera captured an image of the speed limit signboard that was processed on the FPGA board for character recognition by using the optical character recognition (OCR) method. This value is compared with the database to lock the speed of the autonomous vehicle. The complete information of the autonomous vehicle with respect to speed maintained throughout the journey is monitored remotely over the IoT cloud for further enhancements and speed updates along the route.
Even in some areas where we do not find any speed limit boards, especially for these situations, we came up with an additional feature that consists of data pertaining to the speed of different vehicles in different types of lanes are not unique and classified based on the type of vehicle and carriage ways. As an illustration, for carriage type motor vehicles with no more than eight passengers, the maximum allowable speed on an expressway for plain terrain is 120km/h, where as it is 70km/h on municipal roads. Through such data, we propose a speed control system for controlled autonomous driving on any type of road and any type of terrain. The vehicle in which this control method is adopted initiates the journey with tracking using a GPS tracker provided in it. At the start of the journey, the user can select his/her destination point based on the estimated distance as well as the type of roads involved a priori. It shows what lanes are included in that path and respective vehicle speed limits saved as reference. If the vehicle finds any speed limit signboard on the journey, it compares with the data available. The priority for the database of the lines and respective speeds is given when there is no signboard in the way of a vehicle. This ensures the continuous control of the autonomous vehicle in both online and offline situations for all types of roads.
Project Proposal
1. High-level project introduction and performance expectation
Autonomous Vehicle Speed Control on Heterogeneous Roadways
The design challenge in autonomous vehicles as well as in manual-controlled vehicles is speed management under different road constraints. Deployment and testing of autonomous vehicles on the roads are completely related to the speed rules established in the country based on the terrain type as well as the type of motor vehicle. In this regard, safe driving with autonomous control is so crucial. Based on the road or terrain type, a set of speed limits are already in place and they are displayed on the signboards on the roadways. The critical task in the process is to identify the road as well as the speed limit indicator value. Apart from this, the autonomous vehicle should be continuously monitored and traced for uneven behavior for future enhancements.
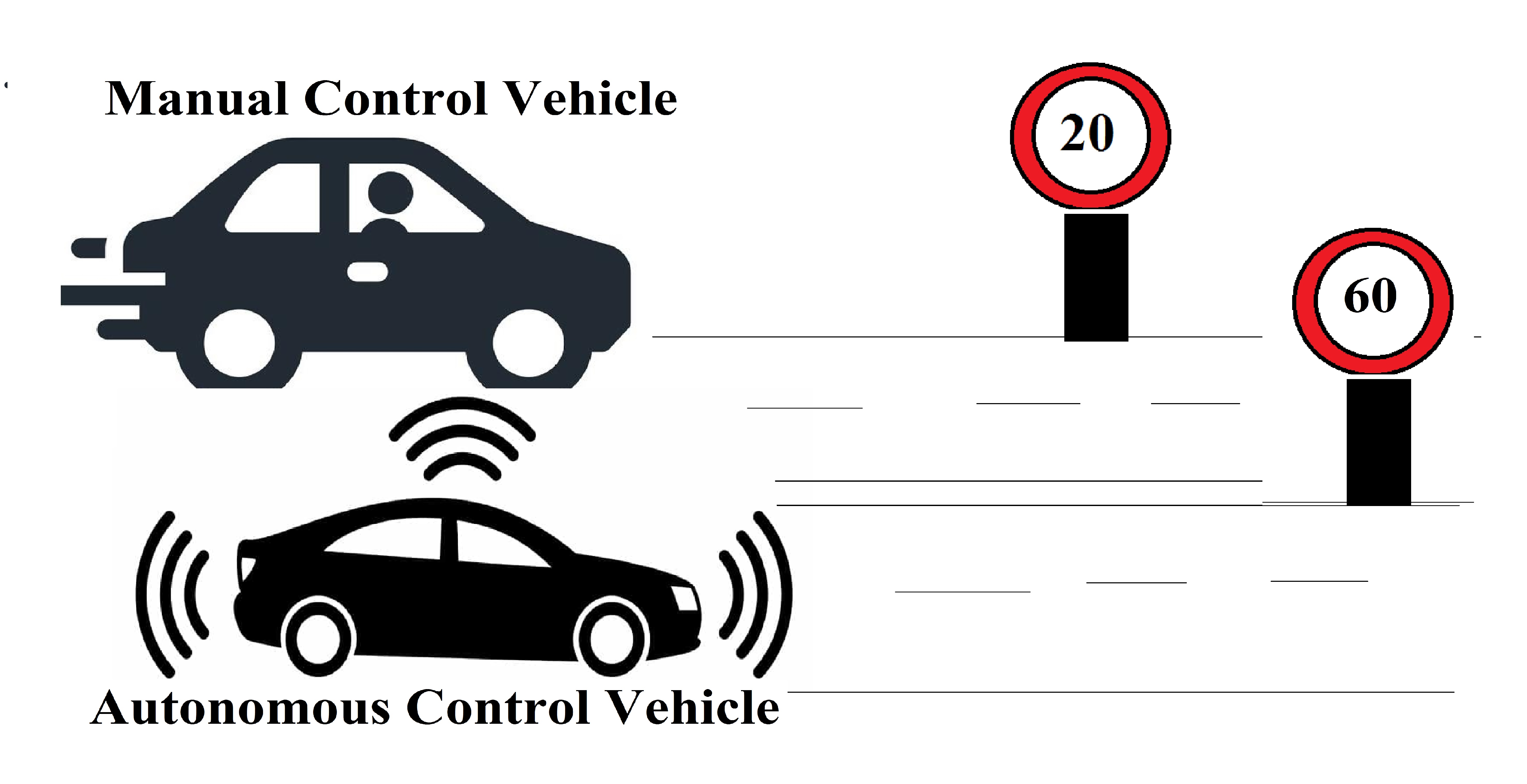
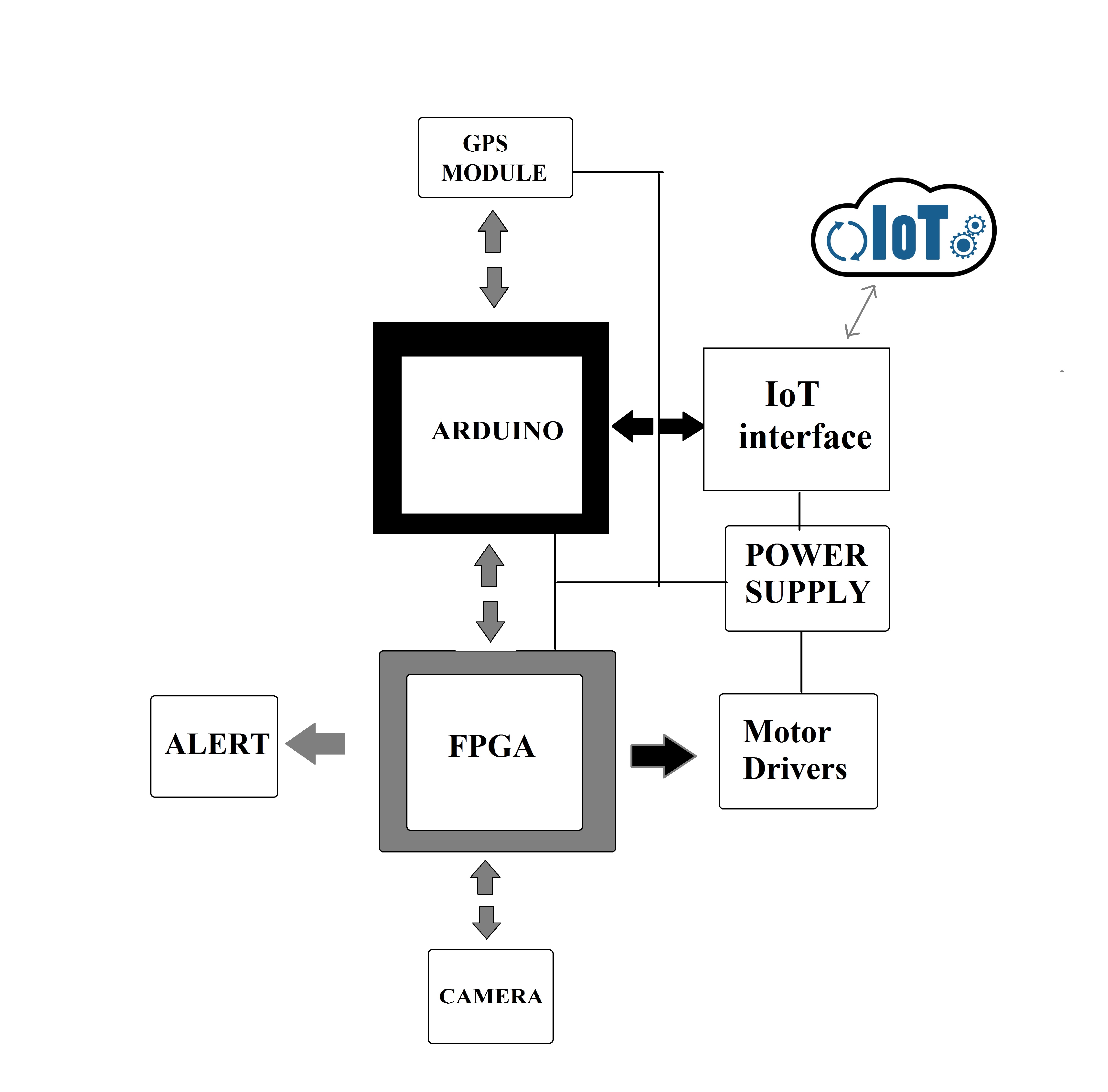
Through this project, a method is proposed that evaluates the multiple tasks, viz., image processing for speed limit estimation through capturing the image and tracking the autonomous vehicle over the IoT platform. Such concurrent computations need a high-end process like Intel FPGA, a camera with moderate resolution, GPS, and IoT devices for controlled driving. As shown in the figure, the same method can be adopted for manual-controlled vehicles to limit their over-speed vehicle movements. This could limit the number of accidents caused by overspeeding vehicles.
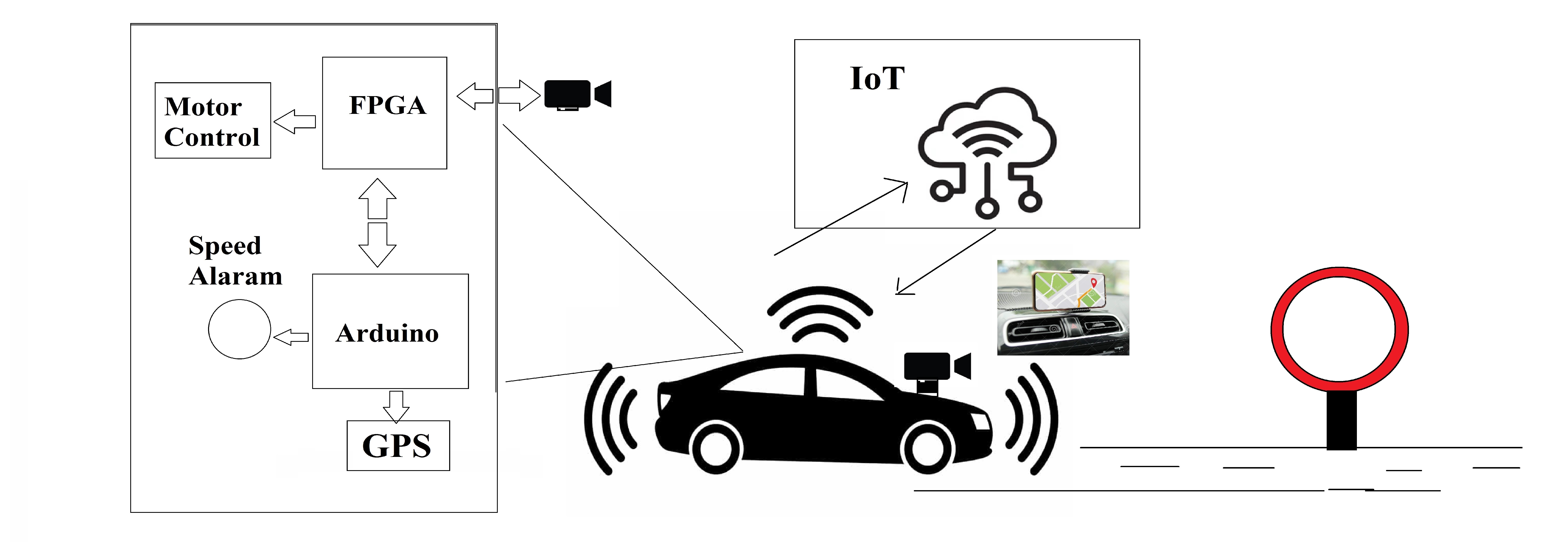
2. Block Diagram
3. Expected sustainability results, projected resource savings
Upon implementation of the Project:
- The autonomous vehicle provided with fast computing controllers like Intel FPGA ensures complete autonomy in the vehicle speed control with feedback control.
- Reduced accidents on the roads due to over speed irrespective of the traffic and the terrain it is moving on is the impact of this method in real-time scenarios.
- Applicability of this system is with minimal devices and little enhancement in terms of devices to be used for applications viz. using available GPS tracking for vehicle information etc.
- The Autonomous vehicle behavior will be available to trace the path followed and unexpected behavior it went in through for enhancement of intelligence.
4. Design Introduction
The implementation of the project starts with the entry of the destination location, the type of roadways involved in the path, and speed data based on the road type. The speed data depends not only on the road type but also on vehicle type, terrain type, and traffic rules, both global and local.
1. The hardware-level design is composed of a control module with high computational efficiencies like FPGA and interfacing with the camera module, GPS and IoT modules.
2. At the FPGA level, an image is processed to identify the speed limit mentioned on the signboard.
3. This data captured compared with the data that is already evaluated based on the destination and roads type before the journey
4. IoT-based communication is established for continuous tracing of the vehicle synchronous to the speed control through image processing by Intel FPGA.
5. Functional description and implementation
OCR :
Optical Character Recognition (OCR) is the process of detecting and reading text in images through computer vision. Detection of text from document images enables Natural Language Processing algorithms to decipher the text and make sense of what the document conveys. Furthermore, the text can be easily translated into multiple languages, making it easily interpretable to anyone.
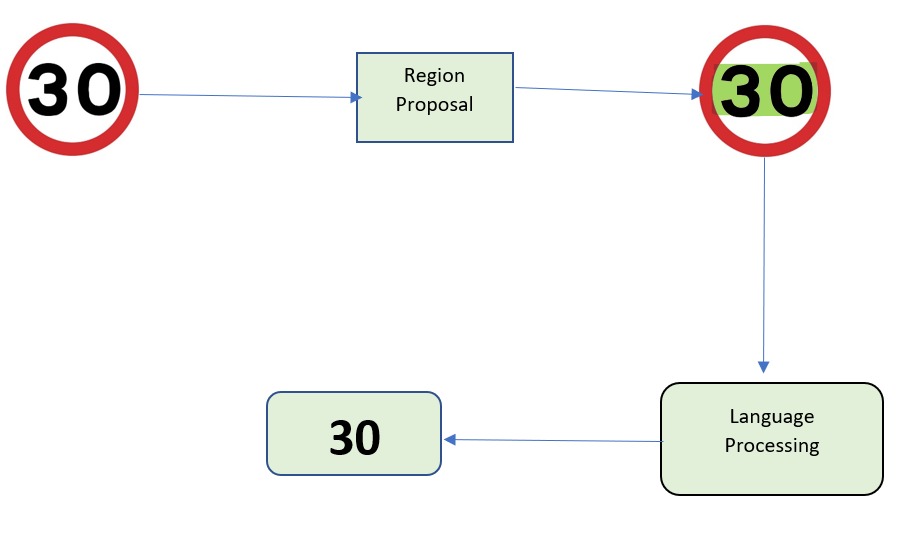
Image processing technology provides a convenient way to convert text into a digital format. An ordinary scanner or photocopy machine creates what is known as a raster image, or a collection of black and white or colored dots. This is done by looking at each line of the image, with the OCR scanner figuring out if the black and white dots represent a certain letter or number.
This data from FPGA is provided to the vehicle and it displays the respective vehicle speed limit and provides to the IoT, Then it cross-checks the data received from the GPS module with the OCR data.
GPS Module:
Speed control of the vehicle is initiated by tracking its movement using a GPS tracker provided.
1. The GPS tracking system utilizes the Global Navigation Satellite System “GNSS” network to integrate various satellites that use microwaves' signals, and the waves get transmitted to the GPS to provide information about the location, the speed, or the direction of things.
2. In the GPS module by entering a destination, the path & lanes in which the user can travel is mapped. By the given path the standard speed limit at which a vehicle should travel is displayed.
3. The priority for the database of the lines and respective speeds is given when there is no signboard in the way of a vehicle. It shows what lanes are included in that path and respective vehicle speed limits saved as reference.
6. Performance metrics, performance to expectation
Performance parameters that the design needs to reach:
(a) it shall be possible for the driver to be made aware through the accelerator control, or through dedicated, appropriate and effective feedback, that the applicable speed limit is exceeded.
(b) it shall be possible to switch off the system; information about the speed limit may still be provided, and intelligent speed assistance shall be in normal operation mode upon each activation of the vehicle master control switch.
(c) the feedback shall be based on speed limit information obtained through the observation of road signs and signals, based on infrastructure signals or electronic map data, or both, made available in-vehicle.
(d) it shall not affect the possibility, for the drivers, of exceeding the system’s prompted vehicle speed.
(e) its performance targets shall be set in order to avoid or minimise the error rate under real driving conditions.
7. Sustainability results, resource savings achieved
Hardware design block diagram :
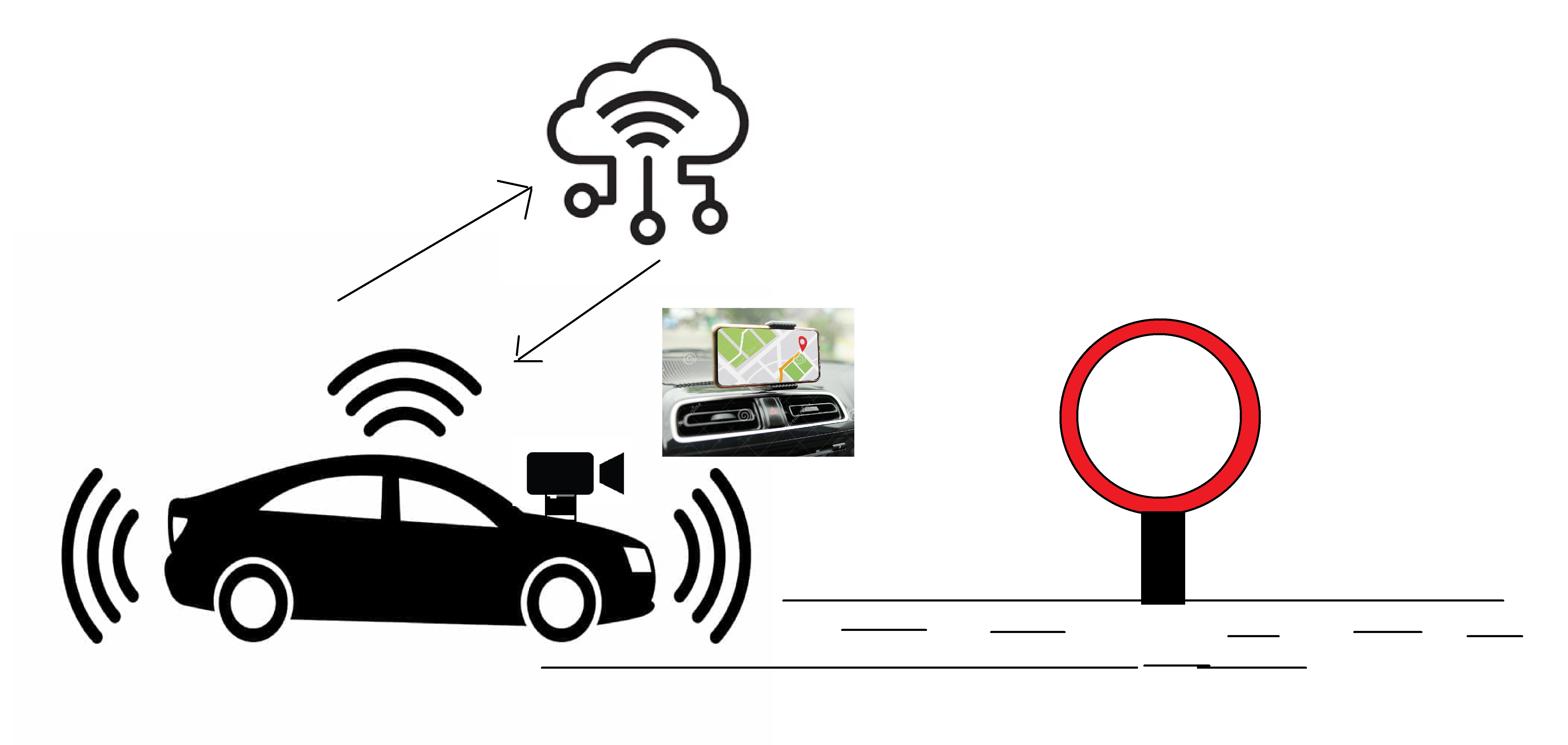
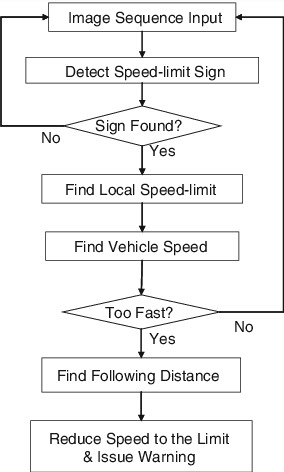
System flow :
8. Conclusion
- By using Autonomous Vehicle Speed Control on Heterogeneous Roadways we can ensure that vehicle speed does not exceed a safe or legally enforced speed.
- We can also reduce the chance of accidents due to overspeed.
- This system effectively helps in accidents prone area.
0 Comments
Please login to post a comment.