
With the development of technology in agriculture, clean water and fertilizer etc. There has been a reduction in wastage of products. However, a large amount of waste is still experienced today. In order to prevent this even a little bit, we designed a mini electric vehicle project that works with solar energy and does not harm the nature.
The designed tool takes a piece of soil sample and determines its humidity, pH ratio, mineral ratio etc. in it. By making the analysis, it transfers it to the user and automatically starts the irrigation system as much as the water needed by the soil. In line with the deficiencies, if the fertilization process is done manually, the farmer will only apply the necessary pesticides.
Project Proposal
1. High-level project introduction and performance expectation
With the development of technology in agriculture, clean water and fertilizer etc. There has been a reduction in wastage of products. However, a large amount of waste is still experienced today. In order to prevent this even a little bit, we designed a mini electric vehicle project that works with solar energy and does not harm the nature.
The designed tool takes a piece of soil sample and determines its humidity, pH ratio, mineral ratio etc. in it. By making the analysis, it transfers it to the user and automatically starts the irrigation system as much as the water needed by the soil. In line with the deficiencies, if the fertilization process is done manually, the farmer will only apply the necessary pesticides.
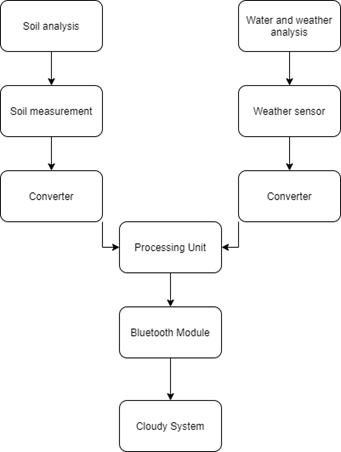
2. Block Diagram
3. Expected sustainability results, projected resource savings
As seen in Maggen H.'s study titled "Balanced Crop Nutrition: Fertilizing for Crop and Food Quality", as a result of unconscious changes in soil nitrogen (N), potassium (K) values due to the fault of the farmers, Maintaining a negative K balance results in decreased soil. fertility and stagnating and even decreasing productivity.[1]
In addition, According to Balson P. sin, "On average, farms around the world account 70% of all water that is consumed annualy. Of that 70% used by farmers, 40% is lost to environment due to poor irrigation systems, evaportion, and overall poor water management."[2]
When we consider these data, if we give the water and nutrients that the soil needs together with the data we receive thanks to the vehicle we will design, we will not only get rid of water wastage, but also ensure that the soil will not lose its fertility in the coming years.
4. Design Introduction
5. Functional description and implementation
6. Performance metrics, performance to expectation
7. Sustainability results, resource savings achieved
8. Conclusion
The main purpose of this mini-vehicle to be designed is to support sustainable and controllable agriculture by providing convenience in the lives of farmers. For all this, the use of a low-cost board such as "EVAL-AD5679R" will be sufficient.
0 Comments
Please login to post a comment.