Robotic era is approaching.
In order to rapidly control the robot, we hope to use the FPGA fast and easily reformat feature as the control platform to make the robot control more convenient.
We provide user friendly mobile phone operation interface for remote control by using the blue tooth. The robot has the function of image recognition and transformation, which is the prototype of future robots in human life.
Project Proposal
1. High-level project introduction and performance expectation
Purpose: Robotic era is approaching. In order to rapidly control the robot, we hope to use the FPGA fast and easily reformat feature as the control platform to make the robot control more convenient. We provide user friendly mobile phone operation interface for remote control by using the blue tooth. The robot has the function of image recognition and transformation, which is the prototype of future robots in human life.
Applications: The scope of the Robot’s application is boundless. We are committed to play the FPGA limit to present the best performance of the FPGA on the robot design. The feature of robot with image identified can be used for search and rescue operations, counter services and so on. And the feature of transforming has the driving mode and the walking mode, which can adapt to different environments.
Target User: The product is currently a prototype of a future robot that can be used as a simulation machine developed in a robot lab or an electronic product for home Entertainment. Currently, there are few FPGA robots on the market, and our team presents a new concept of robot control. On the eve of this robot generation, the FPGA is a powerful response to the GPU.
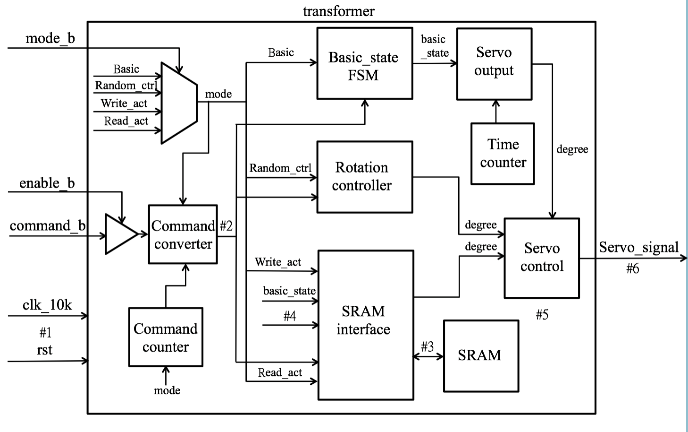
2. Block Diagram
Robot working system block diagram:
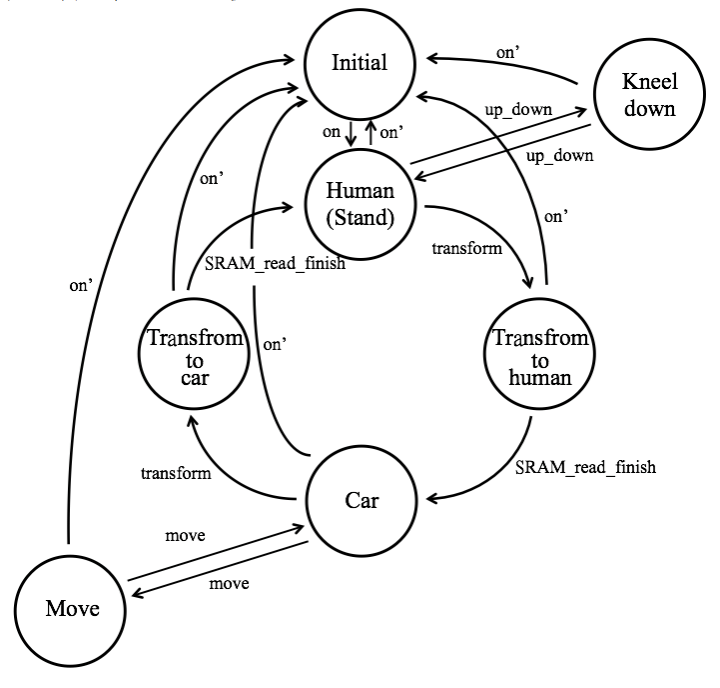
State Transition Graph:
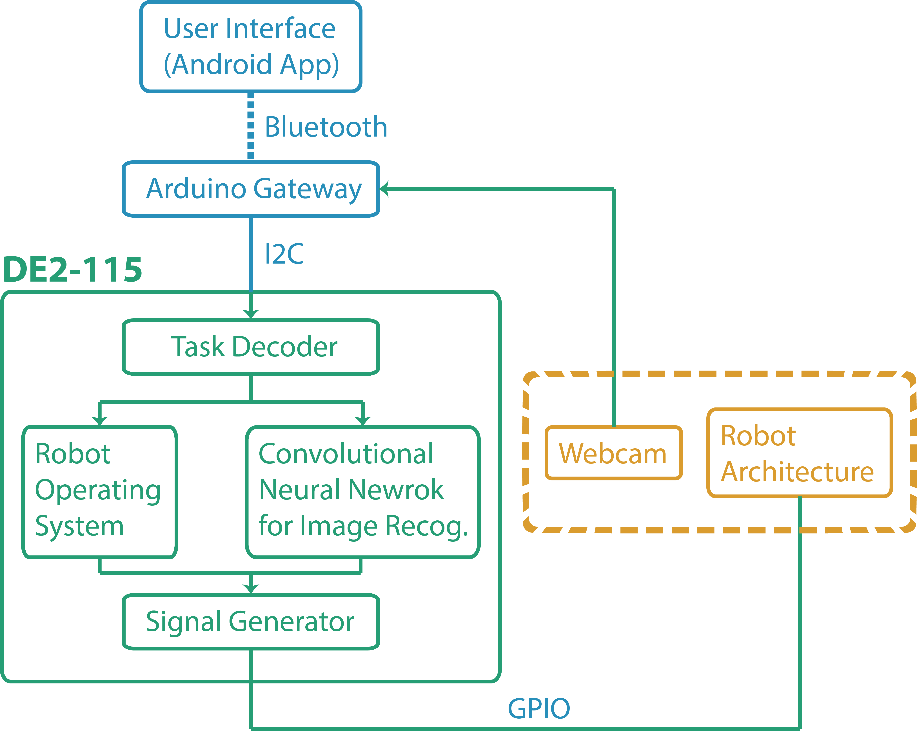
System block diagram:
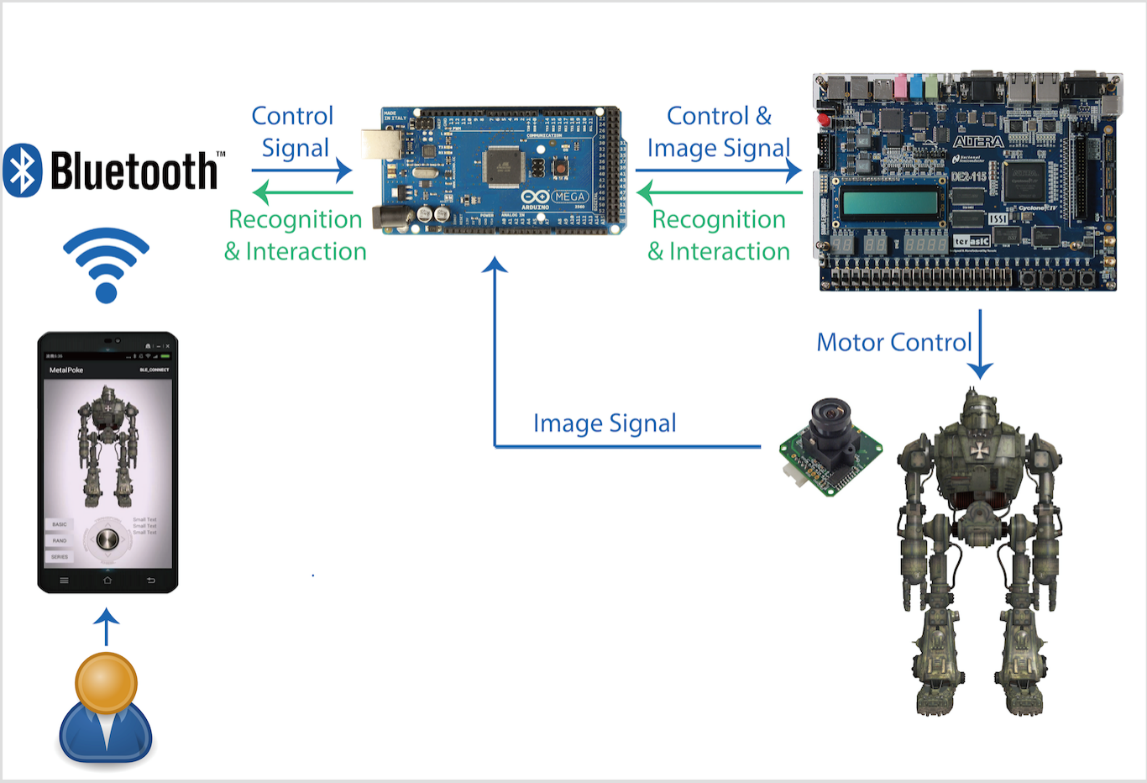
System flow diagram:
3. Expected sustainability results, projected resource savings
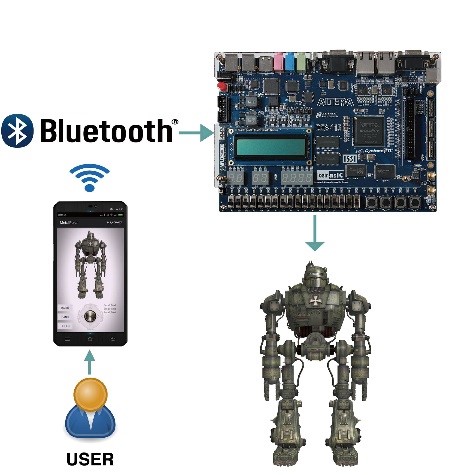
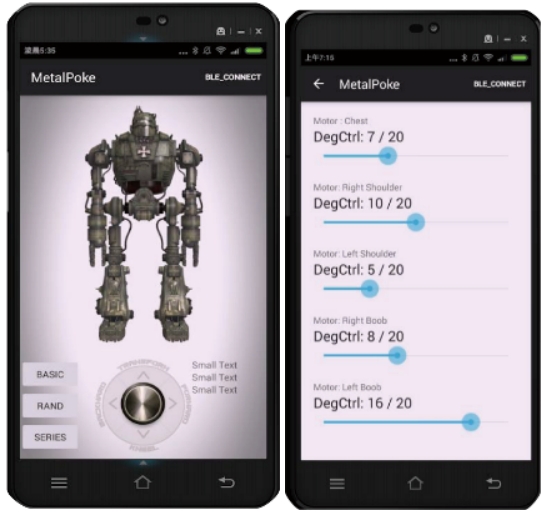
Application Interfaces:In order to provide a friendly operating environment for robot, we designed a mobile phone program, which can directly see the image in front of robot, image identification(not completed), and the robot can be remotely-operated by mobile phone (completed). In addition to being able to transform, you can also design the robot's body movements, or perform different remote controls in the vehicle body and human model. As shown in the picture below:
Bluetooth remote control: We use arduino's blue tooth expansion kit for connecting the FPGA and arduino. By using the blue tooth, robot receives the information from the mobile phone program.
Bluetooth is an extremely important product in the IoT era. Along with the Bluetooth technology developing, its use more widely, unlike wifi needs power supply or infrared direction limited, the Bluetooth can also provide efficient transmission distance.
Mechanism deformation: It includes the robot body design, physical parameter simulation and motor remote control design. All of these are the core of the product, which has a great relationship with FPGA. The ability of FPGA parallel operation can provide better results than the remote control. In addition, in the case of deformation, the control of each joint and each motor needs to be driven by FPGA. This product has made countless fine-tuning of the robot's deformation process, and it has been fully integrated with smooth deformation movements, showing a complete sense of technology.
Image identification: Through deep learning, the module of ability to identify target objects is trained, and all parameters of the module are entered into the FPGA. As long as the external camera gets the image, the input module can be directly identified, fast and simple programming. It is easier than designing special chips for machines learning. It is not only suitable for future robot experiments, but also suitable for medical treatment and rescue operation. Easy to use!
0 Comments
Please login to post a comment.