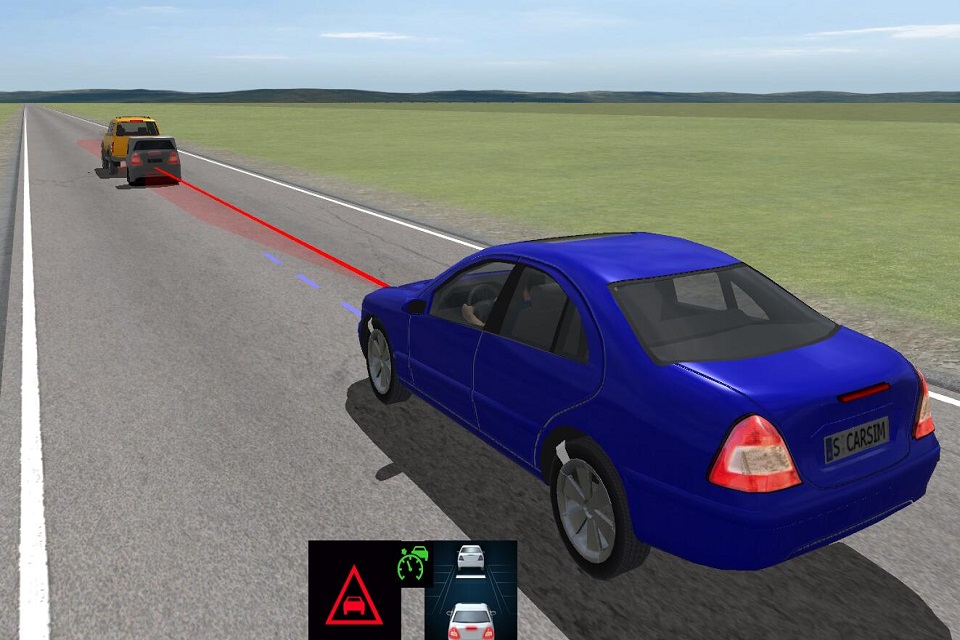
基于车侧的自动紧急制动系统,采用摄像头、毫米波雷达以及人体红外探测器为主要传感器,判断车辆前方出现的人以及其他生物,根据距离等情况进行决策是否进行制动动作。
Project Proposal
1. High-level project introduction and performance expectation
汽车产业正在经历百年未有之大变局,电动化、智能化、网联化和共享化是未来汽车产业发展的主要趋势。当下汽车行业飞速发展,汽车是大众日常出行必备的工具,汽车销量的逐年增长不仅仅改变了人们的生活方式以及出行习惯,同时也随之带来了一系列的问题。汽车保有量的增长导致了有限的道路空间资源变得紧张,车辆容易发生堵塞,交通事故频发,这些问题导致的人员死亡和经济损失也越来越大。根据2016年公安部发布的中华人民共和国交通事故统计年报,2016全年全国共计发生212846起交通事故,共计死亡63093人,直接造成经济损失达120760万元。美国高速公路安全管理局(NTHSA)调查结果显示,驾驶员操作失误导致的道路交通事故约占交通事故总数的90%,车辆故障导致的交通事故仅占3%。这种情况在追尾碰撞中尤为明显,在追尾碰撞中驾驶员没有采取制动的情况占31%,驾驶员采取制动但是制动力不足的情况约占49%,驾驶员全力制动但是制动作用过晚的情况约占20%,这些情况的发生是由于驾驶员没有意识到存在碰撞危险或者驾驶员来不及对即将发生的追尾碰撞进行反应。
随着智能网联汽车的迅速发展,自动驾驶走入人们的视野当中,当下自动紧急制动系统判断范围比较极限,一般在紧急情况下其制动能力是固定的,无法根据障碍物的情况自动调节制动力,导致在车辆前方只要障碍物且达到辅助制动条件车辆即自动刹停,当车速高于40km/h时,只能减速不能刹停。设计一套智能紧急制动系统,能够根据车辆前方出现的目标物种类和距离自动判断制动条件,系统可以作为智能网联汽车AEB模块使用。
基于车侧的自动紧急制动系统,采用摄像头、毫米波雷达以及人体红外探测器为主要传感器,判断车辆前方出现的人以及其他生物,根据距离等情况进行决策是否进行制动动作。对于判定结果通过IOT单元发送,供周围车辆使用
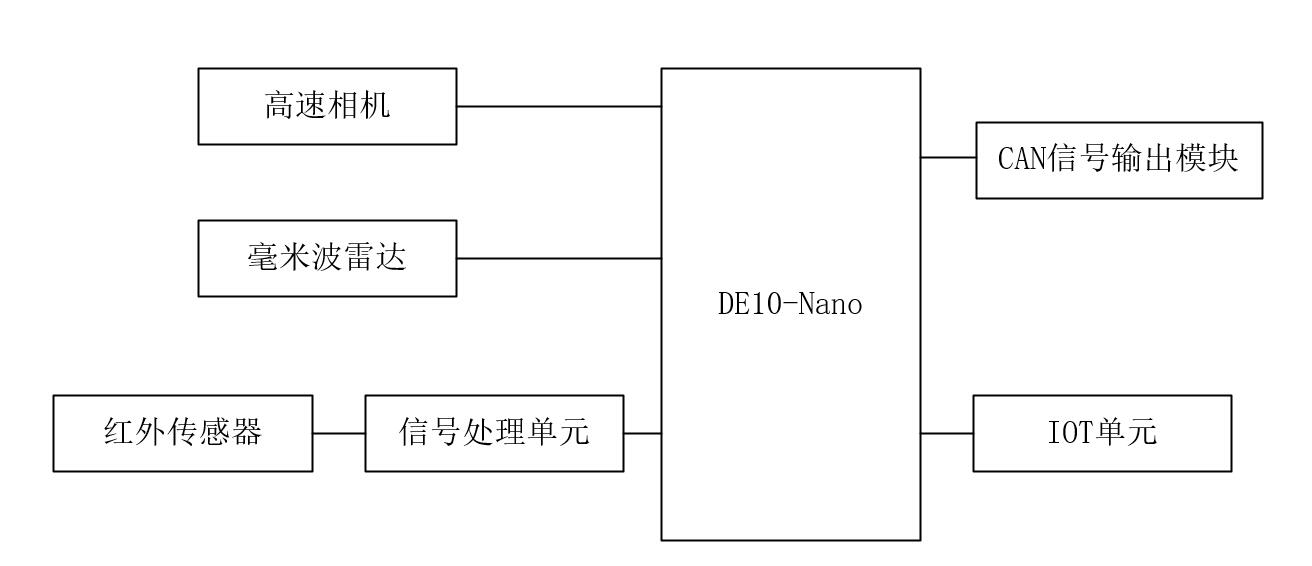
2. Block Diagram
3. Expected sustainability results, projected resource savings
能够在100m内识别人和其他活体,根据当前运动速度和障碍的物的距离给出制动参数。
验证不经过传感器数据同步,采用传感器后处理技术,两个主要传感器各自处理,给出一定的置信区间,验证是否可以完成功能。如果可以,将极大简化数据处理流程和实时性,同时能够满足功能需求。
构建MPC控制模型,平滑制动过程,研究MPC与PID、LQR等经典控制算法的控制性能比较,确定合适的制动控制过程,提升乘车舒适感。
4. Design Introduction
通过两个高清工业相机对车辆前方视觉环境进行采集,通过毫米波雷达对障碍物进行距离探测,通过红外传感器判断前方障碍物活体特性,对三个传感器的数据进行融合,对于前方出现的障碍物的大小和种类进行制动权重设计。利用DE10-Nano上的SOC进行操作系统搭建和数据接口,为了加速图像处理过程,通过OpenCL对工业相机的数据进行处理,关键耗时函数运行在FPGA,提升运算速度,通过Analog Decvices的配套板对红外信号进行处理,同时将处理结果通过IOT单元发送出来,便于周围其他车辆接收使用。
5. Functional description and implementation
通过两个高清工业相机对车辆前方视觉环境进行采集,通过毫米波雷达对障碍物进行距离探测,通过红外传感器判断前方障碍物活体特性,对三个传感器的数据进行融合,对于前方出现的障碍物的大小和种类进行制动权重设计。利用DE10-Nano上的SOC进行操作系统搭建和数据接口,为了加速图像处理过程,通过OpenCL对工业相机的数据进行处理,关键耗时函数运行在FPGA,提升运算速度,通过Analog Decvices的配套板对红外信号进行处理,同时将处理结果通过IOT单元发送出来,便于周围其他车辆接收使用。
6. Performance metrics, performance to expectation
能够在100m内识别人和其他活体,根据当前运动速度和障碍的物的距离给出制动参数。通过FPGA硬件加速,提升MPC控制算法的计算时间,协助搭建外围CAN数据采集处理。
7. Sustainability results, resource savings achieved
8. Conclusion
为了减少汽车碰撞事故的发生、提高交通安全,汽车主机厂与供应商越来越重视汽车的被动安全和主动安全技术,主动安全技术是指在不干扰驾驶员正常驾驶的前提下,避免事故发生的技术。汽车自动紧急制动功能是一种汽车主动安全技术,主要用于在紧急情况下车辆自动完成制动功能,从而避免或者减少造成更大的损失。汽车自动紧急制动功能是当下汽车自动驾驶领域中落地性最强的功能之一。近几年,已有许多车型具备这一功能,但是其识别率、制动效果等问题的存在使得这一功能不够完善,特别是车辆采取自动制动功能时,给车内驾乘人员造成的剧烈惯性冲撞。
研究融合了车辆动力学工程、自动控制和传感器技术等方向,对当下热门的自动驾驶众多功能中的一项进行了研究,可以深入分析自动紧急制动功能的更优解决方案。
1 Comments
Please login to post a comment.
Devarapalli Durga Praveen Kumar
did you access the gpio pins in ubuntu 18.04?