
随着社会的发展,人工智能在人们身边出现的越发频繁,智慧景区以及智慧城市也是当前的人们发展趋势,本设计顺应需求,针对部分场景,如景区中的游客流量、游客、性别等基础信息的统计,或无人超市中人物信息的识别以及保存,并将这些数据备份、发送到云端,并在app中对部分数据进行实时更新,在做数据统计与分析时,利用云端中存储的数据,可以很全面且客观的分析出现状,这些工作靠人力实践是非常耗时耗力的。在必要时,还可调用出对象的信息和图像,对图像进行伪3D显示,大大提高了人们对图像的感知力。基于此类功能以及特性,本设计可广泛推广于安保、有人员统计需求类的场景。
本设计以 DE10-Nano 开发板为平台,结合当前最新推出的 DE10 云套件 RFS 子卡搭建了一款物联网系统,在此基础之上加入摄像头、液晶显示屏以及四片半透明介质,组合构成对象人物信息提取系统和佩伯尔幻像伪全息人物显示系统,并通过在arm核中移植linux系统以及在此之上配置的opencv和openvino环境对获取的图像信息进行处理分析,所得到的数据传回fpga,通过云系统发送到app,实现实时对部分数据的监控,每隔一段时间会发送数据到数据库储存供以随时调用。并可通过调用信息,读取对象人物的信息,选择对象的照片进行全息显示。
Project Proposal
1. High-level project introduction and performance expectation
随着社会的发展,人工智能在人们身边出现的越发频繁,智慧景区以及智慧城市也是当前的人们发展趋势,本设计顺应需求,针对部分场景,如景区中的游客流量、游客、性别等基础信息的统计,或无人超市中人物信息的识别以及保存,并将这些数据备份、发送到云端,并在app中对部分数据进行实时更新,在做数据统计与分析时,利用云端中存储的数据,可以很全面且客观的分析出现状,这些工作靠人力实践是非常耗时耗力的。在必要时,还可调用出对象的信息和图像,对图像进行伪3D显示,大大提高了人们对图像的感知力。基于此类功能以及特性,本设计可广泛推广于安保、有人员统计需求类的场景。
年龄、性别识别这样机械性、主观性较强的行为,机器视觉会有更好的效果。首先人眼有物理条件的限制,机器视觉的精度可达到按像素点来计算。其次,机器可以以相同的方法一次一次完成检测而不感到疲倦,而人眼会感到疲倦,在处理大量数据时,准确率也会下降。同时,面对性别识别这样的二分类问题,人眼可凭瞬间的判断便能得到答案,但面对与年龄判断这样主观性很强的行为,机器视觉通过大量训练样本,通过对真实图像数据的学习,会对图像有更加客观的评价,其准确率会大大高于人眼。对年龄、性别的检测在安全监控、刑侦案件、身份验证、人机交互等方面有巨大应用前景。同时随着人类社会的进步,人对视觉的追求并不会只局限于2D、局限于平面,而本设计提供的利用佩伯尔幻象原理形成伪3D画面也可满足人对于视觉享受的追求。本项目采用的DE10-nano开发板处理速度快、运算能力强、集成度高、开发成本低,也大大证实了本项目的可以发展性。
选用英特尔 FPGA主要因为本校曾有参赛历史,教师有开发经验,且DE10-Nano是目前最流行的一种fpga开发板,利于我们的开发学习。
2. Block Diagram
3. Expected sustainability results, projected resource savings
以目前的趋势,机器视觉可代替很大一部分人眼反复劳动,拥有更高的精确度、更低的成本。而本项目实现的功能在生活场景中能得到广泛使用,如当下流行的智慧景区,只需在景区入口处安装本系统,便可完成数据的统计与分析,对于旅游业的发展有不容小觑的作用;还有其他的如银行、无人超市等场景,在特殊情况时,年龄性别等信息可缩小寻找范围,伪3D显示效果更可以直观的获取人的形体外貌,全息显示作为目前最热门的图像行业之一,在未来也必然是大势所趋,可见本项目的良好发展前景。
4. Design Introduction
本设计以 DE10-Nano 开发板为平台,结合当前最新推出的 DE10 云套件 RFS 子卡搭建了一款物联网系统,在此基础之上加入摄像头、液晶显示屏以及四片半透明介质,组合构成对象人物信息提取系统和佩伯尔幻像伪全息人物显示系统。
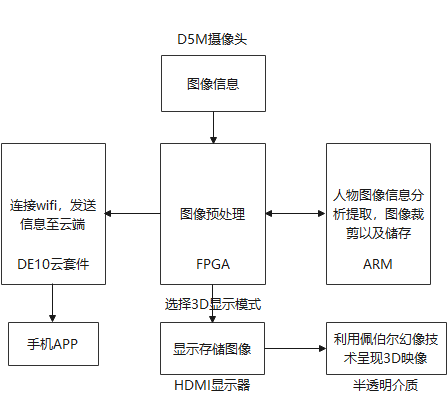
在本设计的所有系统中,DE10-Nano作为总体结构的“心脏”,不断处理来自所有外设所获取的信息,由摄像头采集的图像信息通过OpenCL编写的一个特定IP核对对象人物的图像进行预处理,将处理后的图像通过h2f总线传输给arm核,由linux系统中训练好的人物信息识别程序分析图像,得到年龄、性别、身高等信息,同时统计已识别过的人数以及当前时间,并截取一帧对象的照片,进行人物的边缘切割处理、拼合,处理后的图像编号保存在sd卡中,其他信息也会以同样的编号由云套件传输至云端,且通过云服务器发送至app端,且在计算机端每隔一段时间会将数据发送至数据库更新储存。
5. Functional description and implementation
本设计能实现对人面部信息采集,预测人的性别与年龄并上传性别年龄信息与图片至数据库保存,后续可调用数据库中的图片,实现对人像的伪3D显示。本设计利用Intel的DE10-nano平台设计并制作了一款能实现人脸不同角度特征的检测与识别,将数据上传至数据库,并且利用佩伯尔幻象原理实现远程3D显示,作品首先利用摄像头采集头部两个方向的图像,将人脸的图像数据采集到DDR3的特定物理地址,再通过h2f总线将图像数据传到FPGA的图像处理IP核,该IP核为自定义IP核,能够完成图像格式转换、图像二值化、边缘检测等功能,作品通过OpenCL完成这些算法的设计,具有实时性强、处理速度快等优点。图像经FPGA预处理后,OpenCL输出的图像处理结果通过f2h总线传送给DDR3,SOC中的ARM读取这些数据,再利用卷积神经网络算法,对处理好的图像进行识别,得到预测的结果,并对人物两个方向的关键图像进行存储。后将关键图像送入FPGA中的四个自定义IP核实现图像二值化、边缘检测、图像分割、图像压缩及背景填充,后将处理后的图像送入SOC的ARM处理器,将图像分区域同时显示在一个朝下放置的HDMI显示屏上,在自制的的4片半透明介质中就能显示该人脸的伪3D图像。Linux中安装MySQL数据库并连接Navicat登录管理数据库,在Linux操作系统中将我们人脸识别的数据以及图片存储到MySQL数据库中,在数据库中通过建表将图片和对图片描述的数据相结合,在MySQL数据库中实现存储或者提取图片文件。
6. Performance metrics, performance to expectation
需要达到的性能参数:
1、年龄预估误差:6~7年
2、性别识别准确率:95%~96%
使用intel FPGA的好处:
1. 本项目需要使用卷积神经网络算法,数据处理量较大。DE10-nano超快的处理速度,强大的运算能力,保证了图像识别速度。
2. DE10-nano不仅性能强大,更具有集成度高、体积迷你等优点,保证了本项目系统的便携性。
3. Intel FPGA的开发环境友好,可以很好的缩短了项目开发周期,从而降低项目的开发成本。
7. Sustainability results, resource savings achieved
系统设计方案:本设计利用Intel的DE10-nano平台设计并制作了一款能实现人脸不同角度特征的检测与识别,并且利用佩伯尔幻象原理实现远程3D显示的智慧景区系统,同时系统还能够将游客的人脸特征信息,以及识别出来的年龄和性别信息通过connectivity cloud kit模块发送到云端,方便对景区实现智慧话的管理。本系统充分利用了DE10-nano中FPGA与ARM的高速并行运算的优势,作品首先利用摄像头采集头部两个方向的图像,将人脸的图像数据采集到DDR3的特定物理地址,再通过h2f总线将图像数据传到FPGA的图像处理IP核,该IP核为自定义IP核,能够完成图像格式转换、图像二值化、边缘检测等功能,作品通过OpenCL完成这些算法的设计,具有实时性强、处理速度快等优点。图像经FPGA预处理后,OpenCL输出的图像处理结果通过f2h总线传送给DDR3,SOC中的ARM读取这些数据,再利用卷积神经网络算法,对处理好的图像进行识别,得到预测的结果,并对人物两个方向的关键图像进行存储。后将关键图像送入FPGA中的四个自定义IP核实现图像二值化、边缘检测、图像分割、图像压缩及背景填充,后将处理后的图像送入SOC的ARM处理器,将图像分区域同时显示在一个朝下放置的HDMI显示屏上,在自制的的4片半透明介质中就能显示该人脸的伪3D图像。
硬件设计框图:见图片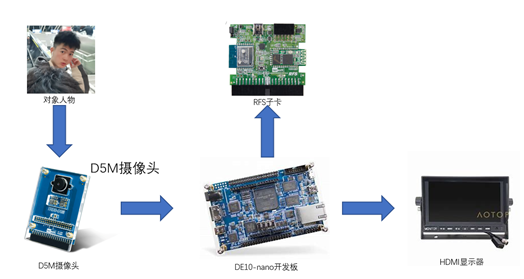
软件流程:在FPGA中利用可编程逻辑单元,通过OpenCL编写了一个特定的IP核来完成边缘增强、轮廓检测、直方图均衡化等功能,将摄像头获取的图像送入FPGA中进行预处理,将经过预处理后的脸部照片送到SOC的ARM核中,使用深度学习概念中的卷积神经网路对人脸图像进行特征提取,根据提取到的特征,对待识别的人脸图像进行性别判断和年龄估计,最后根据标签分类及标签标注文件输出分类结果。
8. Conclusion
0 Comments
Please login to post a comment.