This project proposes a digital twin system design method applied to mobile robots.
This method enables synchronized actions between real and digital mobile robots. The
real robot system designed in this thesis uses DE10-Nano board as the main hardware controller, which has the advantages of low cost and low power consumption. The digital robot is built in the Gazebo simulator, allowing the robot simulation can have high-quality rendering effects and high-performance motion performance.
In this project, both real and digital robots use Robot Operation System (ROS) as the main operating system. At the same time, the digital twin robots will also transmit data and communicate through ROS. By collecting the motor voltage and current signals of the real robot and the encoder speed, the fuzzy clustering (FC) method is used to establish a fuzzy identification system of the motor. Then applies this motor fuzzy identification system to a digital robot, so that the digital robot can simulate the state of a real motor.
Demo Video
Project Proposal
1. High-level project introduction and performance expectation
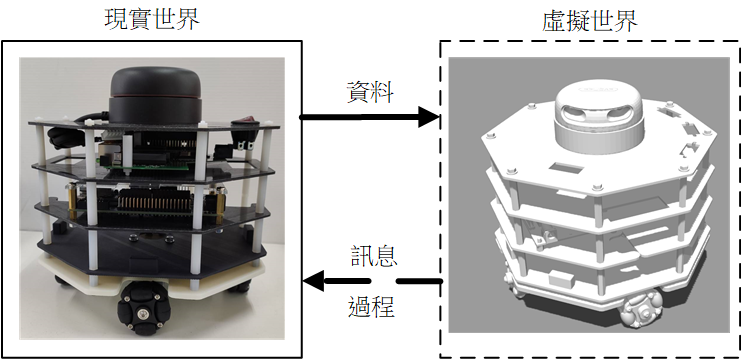
數位孿生(Digital Twin, DT)技術被認為是實現虛實整合系統(Cyber Physical System, CPS)的核心技術,這是一種模擬技術,它通過充分利用物理模型、感測器更新、操作歷史和其他數據來集結合成。數位孿生技術如此重要的原因在於它可以在物理世界和數位世界之間提供近乎即時的全面聯繫。由於真實世界與數位世界之間的這種交互性,數位孿生可能會形成更豐富的模型,從而進行更真實的測量及預測。它是將現實物理設備整個生命週期的過程的映射到數位設備上的高級技術,而且也是工業4.0的基本技術。由於現在電腦便宜而且強大的計算功能,使得互動式測量結果可以使用現代的大規模處理體系結構和先進的算法進行分析,以進行即時預測反饋和離線分析。
本作品擬以數位孿生技術設計與建立一台數位孿生機器人。首先會在電腦端的模擬器內,建造一數位的全方位移動輪型機器人,其機構規格會跟現實全方位移動輪型機器人相同。接下來透過FPGA板收集現實機器人身上的感測器資訊以及馬達的命令,傳送回電腦端。最後透過電腦或雲端進行數據分析找出數位機器人的系統參數,讓數位機器人可以重現出現實機器人的動作。
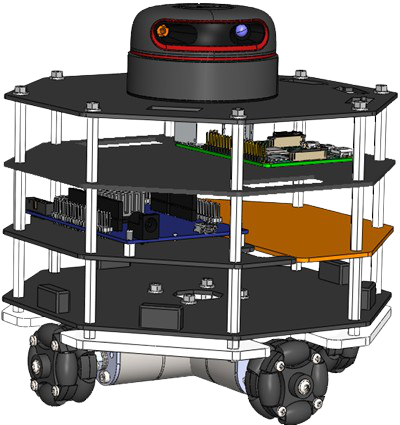
本作品所建立的數位機器人如圖1因為與真實機器人如圖2具有高度相似的硬體參數以及相關移動數據,因此可透過對數位端機器人進行資料分析、模型建構以及控制,同時對現實機器人進行對稱性管理與控制。
另外在建立數位機器人後,本作品擬透過強化學習粒子群最佳演算法來學習數位機器人的馬達控制器最佳參數。再將馬達參數帶入到現實機器人中,讓機器人可以得到最佳的移動參數,最後進行驗證所建立的數位孿生系統的可靠性與正確性。
|
|
|
|
圖1、數位機器人 |
圖2、實體機器人 |
 (1).jpg)
2. Block Diagram
本作品的系統方塊圖如圖3所示。機器人端主要的FPGA核心板是DE10-NANO 。FPGA透過 I2C 獲取 IMU 所提供的加速度、角速度以及磁力共九軸資訊以計算機器人姿態;透過電壓和電流感測器以獲取馬達驅動器所供應給各顆馬達的電壓以及電流大小,其類比資料經由類比數位轉換器轉為數位訊號後由 SPI 介面傳輸。
|
|
|
圖3、Block Diagram |
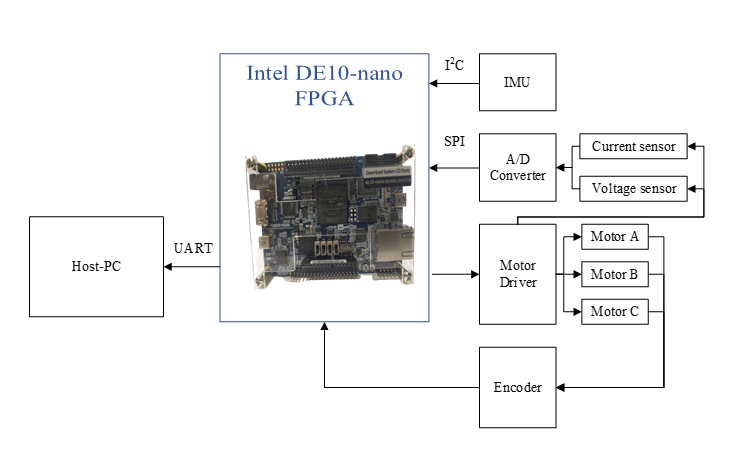
DE10-Nano 可透過下達控制命令來控制馬達轉速且回授各個輪子的轉速資訊,最後把所有蒐集到的資訊透過無線傳輸方案把數據資料上傳到 Host PC 或是雲端做數據分析來找出數位機器人的參數。
DE10-Nano 的主要功能:
- 計算機器人姿態
- 取得感測器資訊
- 下達馬達控制命令
- 取得馬達回授資訊
- 及時上傳資料到Host PC或雲端AI
3. Expected sustainability results, projected resource savings
數位孿生具有可輔助決策和產品行為預測的能力,在國家發展方面,近年來台灣在推廣的「自動化工廠」,若具有數位孿生相關技術的加持,可使推廣的道路更加平坦,且若再使數位孿生系統搭配AI可以使「自動化工廠」這一成果更加自動與便捷。
本作品所提出的數位孿生系統與AI搜尋控制器參數,在機器人的研究上都是近年熱門且重要的技術。除了提出建置數位孿生系統外,也有利用數位孿生系統搭配AI進行找尋馬達控制器參數。最後可以將訓練好的神經網路實現在現實機器人系統上面去驗證,以做到虛實整合與數位孿生的概念。
該技術能夠提供許多優點如下
1. 縮短產品開發週期與成本
2. 降低維護成本,提升服務品質
3. 提升產品與企業價值
4. 與物聯網 IoT、AI 機器學習、雲端運算、大數據分析、5G 結合產生綜合效 益。目前已經有看到的實際應用的場域,分別在航太業、智慧工廠、智慧城市、真人數位分身上都有不錯的應用。
預計使用資源如表1所示
表1
|
RFS-9-axis IMU |
|
DC1338B Current & Voltage Monitor |
|
DC1012A-A A/D Converter |
|
Microsoft Azure IoT |
|
4 Motors and Wheels |
|
Motor driver |
4. Design Introduction
本實驗目的在於收集大量感測器資訊,將大量的感測器資訊傳遞給Host PC端或是雲端進行AI訓練來達到數位孿生的目的,兼顧實時性和同步性,必須實時的蒐集感測器數據和同步的送出馬達控制命令,透過硬體加速的方式,來改善微電腦單晶片的效能不足,因此本實驗設計了ADC控制器、馬達控制器、IMU控制器、馬達回授編碼器,使用以上周邊元件可以大大的減輕Host PC上的負擔。
5. Functional description and implementation
ADC 控制器:
ADC晶片讀取類比的馬達電壓電流資訊,再透過SPI介面來與FPGA溝通,讀取每顆馬達電壓電流的數值,其控制器的核心即是以SPI控制器為核心,來讀取ADC每個通道數位化後的類比資訊。
馬達編碼器:
透過馬達自帶增量型旋轉編碼器,此編碼器會回傳AB項方波訊號,兩個訊號有90度的相位差,在不同旋轉方向時,兩個項位的項序會不同,根據其項序不同可以得知正反轉,根據方波計數個數可以得知轉動速度,經過馬達編碼器數位電路解碼後回傳轉動方向與速度給Host PC
IMU控制器:
使用IMU來測量機器人的姿態以及運動情況,因選用了以I2C通訊方式的IMU,因此設計中包含了I2C控制器,又因IMU較容易受到雜訊干擾,此設計也包含了卡爾曼濾波器以濾除雜訊。
馬達驅動控制器:
在馬達控制系統中會在FPGA中設計PID控制器和脈波寬度調變(Pulse-width modulation,PWM)模組輸出轉速及正反轉訊號給馬達驅動器來驅動馬達。
6. Performance metrics, performance to expectation
預期此系統能夠實時的處理及回傳所有感測器的訊號給Host PC,以及同步控制馬達。
希望讓使用的資源數量能夠在體積最小的嵌入式FPGA平台上運行,其目標平台為DE0-NANO,期望控制Logic Elements數量大約在兩萬以下。
7. Sustainability results, resource savings achieved
在Host PC端可以收到FPGA回傳的資訊如下圖 4所示,包含馬達的控制命令、實際轉速和ADC收到的電壓電流值、IMU的加速度計和陀螺儀數值
|
|
|
圖 4、FPGA回傳資訊 |
.png)
資源使用量如下表2所示
表2、資源使用量
|
使用資源名稱 |
使用量 |
|
Logic Elements |
14845 |
|
PLL |
1 |
|
Multiplier |
11 |
|
Register |
9450 |
|
Memory bits |
76065 |
實驗結果表示可以輕易的運行在DE0-NANO上面,LEs僅使用其14875/22320 約67%的資源,Memory bits僅使用其76065/608256約13%的資源。
8. Conclusion
得益於FPGA的平行處理和低功耗,此嵌入式系統擁有同時處理大量感測器資訊的能力,和能夠很好的同步控制馬達,大大的降低了Host PC的負擔,也不會對電源增加太多的負擔。
本文提出之數位孿生系統,不只可使用於移動型機器人,也可以本文提出之建構方法對人型機器人、機械手臂等進行相同的系統建構,在未來企業進行數位轉型時,可透過本文提出之方法將工廠進行數位孿生系統之建構。
對於未來展望方面,本文提出的建構數位孿生系統之方法目前只適用於單一機器人,此數位孿生系統也是針對單一機器人進行建構,若在多台機器人上進行系統建構各自工作可能沒有太大問題,但若要在多台機器人上進行系統建構並使其進行互動可能會有巨大問題產生,為此可望後續能夠將此數位孿生系統繼續進行改良,使其能夠於多機器人上使用。
0 Comments
Please login to post a comment.