 Autonomous Vehicles
Autonomous Vehicles
Blind Spot Detection and Warning System for Vehicles
AP054 »
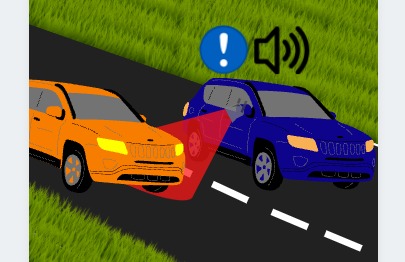
In this project, we aim to develop a blind spot detection system. In scenarios where vehicles are navigating sharp turns or bends, the area alongside and just behind the vehicle is a constant source of danger and often the cause of serious accidents. To make navigation easier in such scenarios, blind spot detection can be used to warn drivers of impending collisions. In the proposed system, ultrasonic sensors or lidars will be used for blind spot detection.
Sensor data will be acquired by a custom data acquisition system implemented on the FPGA. Sensor noise filtering and basic sensor data fusion will be performed using the ARM Cortex 9 Processor provided on the FPGA. A behaviour control model will be designed and implemented on the FPGA which will be interfaced with the display system on the vehicle and the speakers. If the driver fails to spot objects or vehicles in the blind spot while turning, or fails to detect adjacent vehicle lane changes in its vicinity, this behaviour model will trigger visual and audio warnings.
Sensor data will be uploaded to the cloud using Microsoft Azure. On the cloud, a learning algorithm will be developed which generates the possible trajectories of vehicles in the blind spot and provides the necessary warning signals back to the FPGA mounted in the vehicle.
 Other: Sustainable Agriculture
Other: Sustainable Agriculture
FPGA based Agriculture Monitoring system with BLE mesh and IoT
AP055 »
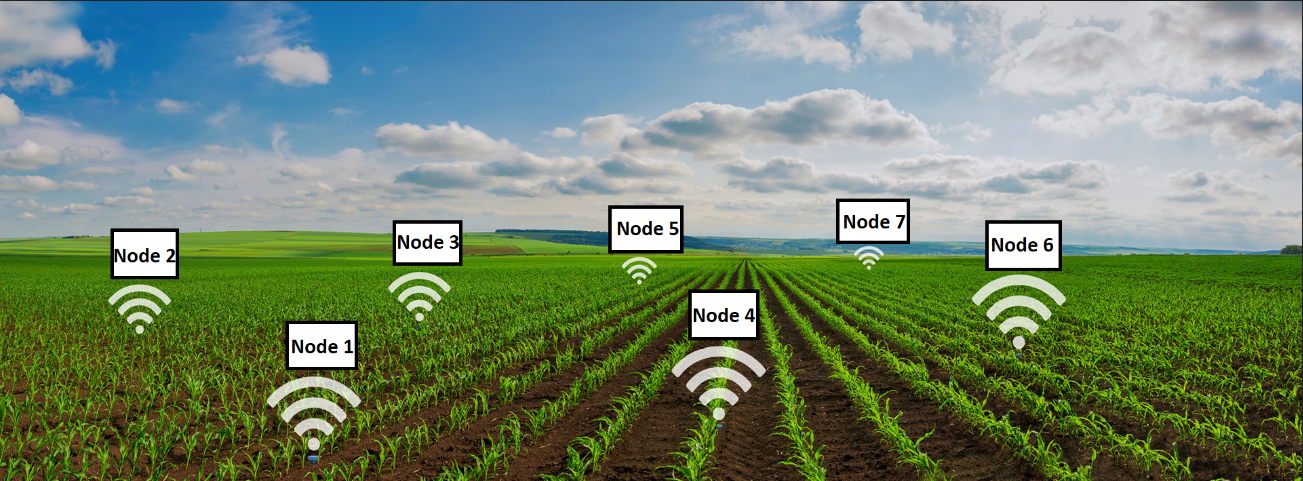
The proposal is to develop a BLE (Bluetooth Low Energy) mesh system for network of sensors which monitors various parts of agricultural lands with FPGA (DE10 nano) being the processing unit. The land under monitoring is split into a grid of smaller areas. Each of these areas have a remote Bluetooth node with a sensor system in it. This sensor system monitors several factors like moisture in the soil, temperature, pH level which are essential for agriculture. The nodes which are connected in a Bluetooth mesh sends the sensor data to the master (Bluetooth) which is connected to FPGA (DE10 nano) and ESP8266 Gateway. With the data from the nodes, particular areas can be monitored for proper field conditions. All these data are then processed in the FPGA and transmitted to a web-based platform through IoT where the farmer can see the data.
 Health
Health
FPGA Accelerated Real time Medical Data Analysis
AP056 »
Real-time monitoring of patient data during medical operations can provide important diagnostic input that substantially improves the chances of success. With the growing speed of sensors, frameworks like Deep Neural Networks must execute computations under stringent time restrictions for real-time operation. The conventional computing platforms like CPU/GPU for running Deep learning algorithms incur a large overhead due to fixed architecture, communication protocols and memory accesses methods. However, the FPGA-based design can directly interface sensors, storage devices, display devices and even actuators, thus reducing the delays of data movement between ports and compute pipelines. In order to minimize human involvement and respond at an appropriate time, An FPGA accelerated healthcare monitoring system is proposed which can either monitor or measure three vital signs i.e. heart rate, respiratory rate and body temperature of human body. It will give the health report, health status and alerts to the concerned when required.
 Health
Health
FPGA IMPLEMENTATION OF DEEP LEARNING MODEL FOR RADIOGRAPHIC EXAMINATION
AP057 »
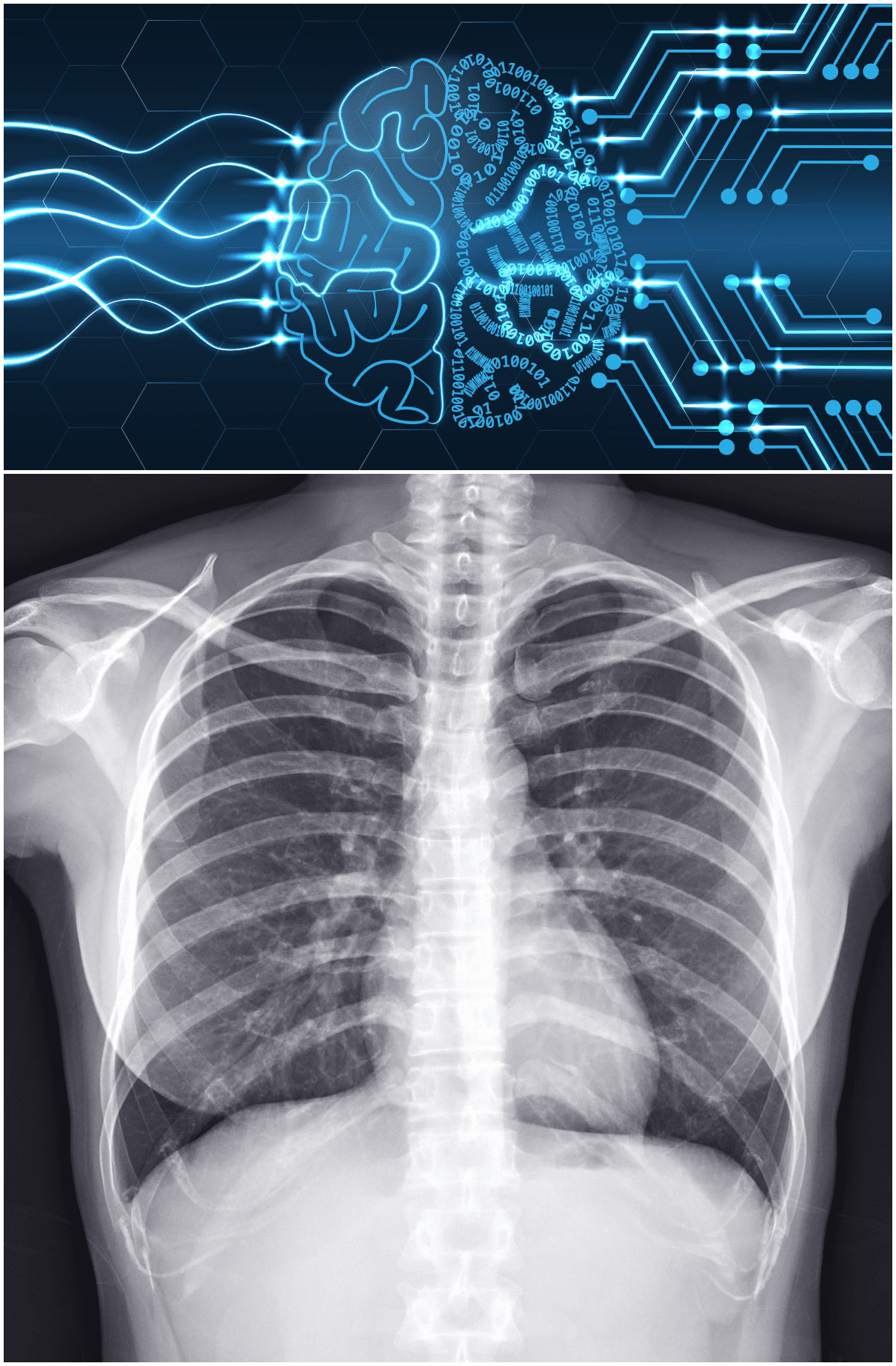
The healthcare vertical today is patient centric and data driven with the advances in IOT and Artificial Intelligence. A need for early detection and diagnosis for any contiguous diseases or infections is required which is generally performed through radiographic analysis. Deep learning in the field of radiologic image processing reduces false-positive and negative errors in the detection and diagnosis of disease and offers a unique opportunity to provide fast, cheap, and safe diagnostic services to patients.
Deep learning has the potential to augment the use of chest radiography in clinical radiology, but challenges include poor generalizability, spectrum bias , and difficulty comparing across studies. Recently, several clinical applications of CNNs have been proposed and studied in radiology for classification, detection, and segmentation tasks. The Deep learning deterministic model predicts the radiograph into three classes such as Normal, Covid and Viral Pneumonia. The probabilistic model predicts the radiograph into Normal, Cardiomegaly, mass and other abnormalities using Class activation maps(CAM). The main objective is to develop a deep learning–based reconfigurable architecture that can classify normal and abnormal results from chest radiographs with major thoracic diseases including pulmonary malignant neoplasm, active tuberculosis, pneumonia, pneumo-thorax, covid-19 etc, and to validate the performance on Intel FPGA.
Autonomous Vehicles
Collision Avoidance and Traffic Management
AP058 »
The National Highway Traffic Safety Administration (NHTSA) estimates that about 9 per cent of all motor vehicle accidents occur due to some kind of lane changing or merging collision. These types of crashes are often dangerous because the other vehicle involved in the accident is caught off-guard and left in a very vulnerable position. Thus, changing lanes abruptly leaves the accident victim unable to react to avoid the crash.
The main cause of this is human error in recognition and decision making. Active safety systems have thus great potential for increasing vehicle safety at turns and intersections. It can issue warnings to the driver to take control of the vehicle in critical situations.
Some premium cars have already implemented some features for the vehicle collision avoidance system, but it's not yet scaled to every segment. Collision avoidance systems will act as a great boon to mankind in solving problems of navigation, road accidents and will help in better traffic management.
In the proposed system, wheel speed encoders, accelerometers and gyroscopes will be used as sensors for collision avoidance. These sensors are placed on all four corners of the vehicle, and the data will be acquired by a custom data acquisition system implemented on the FPGA. Sensor noise filtering and basic sensor data fusion will be performed using the ARM CORTEX 9 Processor provided on the FPGA. This information is then transferred to the cloud using the Azure cloud connectivity board.
The trajectory of all the vehicles in a window of interest around each vehicle will be estimated by a regression-based machine learning algorithm and if the estimated trajectories point to a possible collision, the driver will be alerted with visual and audio warnings. On the cloud, a learning algorithm will be developed which will be trained using predefined datasets to send the necessary warning signals to the vehicle thereby alerting the driver about the forthcoming collision.
This information can be extrapolated and integrated into a traffic management system in which the trajectories can be used to prevent congestion of vehicles at traffic intersections by advising the drivers of the speed with which they need to drive while approaching the intersection.
 Other: floating waste collector
Other: floating waste collector
Self-driving Floating Waste Collector
PR036 »
Our project will be a self-driving boat that collects garbage floating on water. The boat will have a camera mounted on it, which sends image captures to the DE10-Nano board to analyze where, in relation to the boat, the garbage is. The board then controls the motors of the boat to drive it to the waste and picks it up. There will be a Wi-Fi system built-in so that the board can send live video feedback to a connected PC, while also receive commands from the PC to control the boat, in case it goes out of control. The garbage collection is, under most circumstances, fully automated. It uses sensors to detect if the collection is approaching its max capacity, and will return to a set location near land if it does, to dump out the trash and prepare for the next round of garbage collection. We aim to utilize edge computing for image recognition on objects floating on water, to distinguish whether they are actually garbage or not, confirm their location, and compute how to get there.
Smart City
Smart Energy Meter
AP059 »
Energy and environmental problems are closely related, since it is nearly impossible to produce, transport, or consume energy without significant environmental impact. The environmental problems directly related to energy production and consumption include air pollution, climate change, water pollution, thermal pollution, and solid waste disposal. The emission of air pollutants from fossil fuel combustion is the major cause of urban air pollution. Burning fossil fuels is also the main contributor to the emission of greenhouse gases.
Wasted energy still means that it was produced. Therefore, we burned a ton of fossil fuels for no reason. That means there were both carbon and methane emissions, for electricity that was never even used. As a nation, we are not the most efficient with our appliances, which has a cumulatively negative effect.
Let’s take lights for example. How often have you left the lights on while heading out for the night? I’m sure plenty of times. We’ve all been guilty of leaving the lights on. The problem is that since it is such a common habit, it easily adds up, contributing to the 66.7 percent of wasted energy.
Wasting electricity creates the ultimate domino effect that can one day leave us with a country with insufficient room for all of its citizens.
To solve this issue and problem, the Authors have proposed the idea of Smart Energy Meters. In idea, Smart means it will be an IoT Edge Device connected with Appliances/Switchboards and monitor the consumption at regular intervals. This device will transfer the data from Edge to the cloud for analysis and generate reports for consumption. On the server-side Author will be developing an ML model which will analyze this data and keep giving suggestions to change old devices, alarms while the waste of energy is detected when no one is using, servicing the appliances, etc., all reports and data are available via application at end user as per their requirements and needs.
 Smart City
Smart City
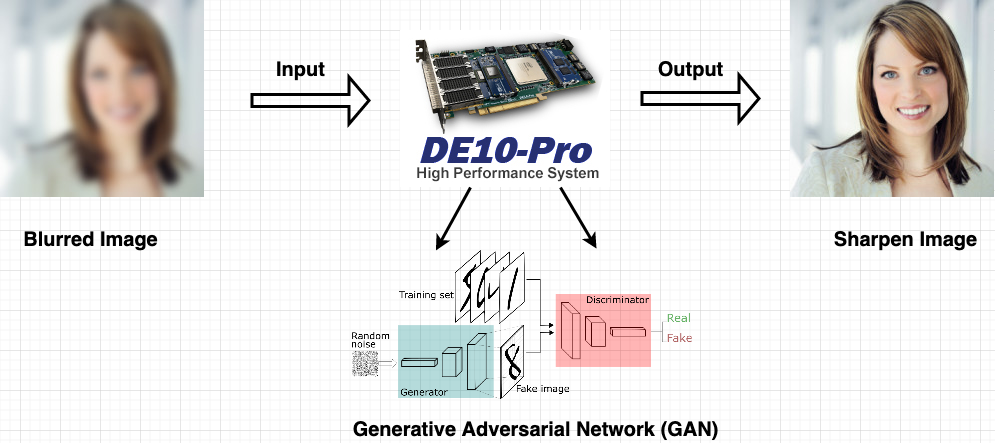
Fast Image Deblurring Reconstruction using Generative Adversarial Networks
AS032 »
Deblurring is the process of removing blurring entities from the image. In recent times, with the advent of machine learning there has been tremendous effort from the research community to come up with new deblurring techniques. However, the state-of-the-art deblurring technique still takes hours of time to construct proper deblurring effect. Therefore, in this project the objective is to construct proper deblurring image instantly. In order to accomplish that we will be using Generative Adversarial Networks (GAN). We have come up with a solution to speedup the GAN training. We will be deploying our solution into the cloud connectivity kit and also make use of Microsoft Azure, in order to generate accelerated deblurring image reconstruction.
Our project will have multiple applications starting from Smart City, Autonomous Vehicles, Industrial etc, as it involves creating proper visible images from blurring entities.
Marine Related
E-Matsya: FPGA Implemented Data Acquisition System
AP060 »
India has a coastline of 7516.6 km-- 5422.6 km of mainland coastline and 2094 km of island territories. India has nine coastal states: Gujarat, Maharashtra, Goa, Karnataka, Kerala, Tamil Nadu, Andhra Pradesh, Odisha, West Bengal. This addresses the biodiversity in the marine environment possible. Since the sea is beside the Western and Eastern Ghats, the diversity in the both regions can also be seen in sea. The sea has been a home for many marine animals and plants, along with helping many humans to depend on them. Thus, it is very essential to give technological assistance to maintain and make the marine environment more sustainable. Here calls the need for the observation of physical properties in the coastal region.
The E-Matsya is expected to serve, assess and monitor the environmental condition of the said regions. To do so, E-Matsya needs to be entirely autonomous in nature i.e., it needs to be piloted by an onboard computer to complete pre-programmed mission objectives. To attain this objective the use of the FPGA can be exploited completely, as it is reprogrammable and plays an important role for offering parallelism to perform various data collection from sensors and their analysis.
Our project aims at profiling the sea in 2 dimensions i.e., vertical and horizontal, which helps in conservation of the marine environment. The E-Matsya is expected to operate at an optimum depth of 10 meters and it can move up to 30 meters horizontally. Thus, the expected sweep area is 3000 sq. meters. Scalability, Cost effectiveness and robustness were the guiding design principles in this project.
 Autonomous Vehicles
Autonomous Vehicles
SMART SHIP
AP061 »
As per the UNCTAD calculations, the total cargo unloaded through maritime trade in the year 2000 is about 5984 million tons and the same has become 11076 million tons in the year 2019. But this marine ecosystem is quite challenging when it comes to transportation such as accidents, loss of crew, oil spills, Suez canal blockage, effect on marine life etc.,
To bring in efficiency in the above, autonomous vehicles “Ships” may help the maritime ecosystem by minimizing human errors and handling the situations of weather uncertainty conditions. Currently the work on the “Autonomous ship” is in the development of remote-operated vessels in Rolls-Royce. The MV Yara Birkeland is an autonomous 120 TEU container ship that is under construction and is due to be launched in 2021.
Now, if the above autonomous ships use the FPGA platform, There may be better performance in the operational speed of decision making and response mechanisms due to the special features of the FPGA platforms.
We are hereby proposing the design of a prototype of autonomous ships using the FPGA module (along with Azure Cloud) which will have the following features:
1.Ship movement with Global Positioning System.
2.Real-time monitoring of ship (using Azure Cloud).
3.Object detection and lane detection.
4.Route planning without collision.
By automating every task and resolving every challenge we can expect that AUTONOMOUS SHIP can revolutionize the maritime industry. It will allow the ship owners to manage their fleet to optimize operations and maximize profit. Implicitly, as the accidents get reduced (such as oil spilling etc) the pollution in the marine system can also be reduced.
 Water Related
Water Related
project Green-Globe
AP062 »
Over-Watering and Under-Watering are the two concern-able scenarios actively addressing the water conservation which is one of the major global challenges. There are trained gardeners who can water the plants regularly and maintain the gardens and other landscape plants effectively. But how much we control the water wastage from human hands while watering plants, there is a considerable error happening always, and we can control it by autonomous systems. Project "Green-Globe" is our idea to create some momentum in addressing this issue. We're focusing to develop an authentic system with using which we can utilize the natural resources ( i.e., Water) properly to grow the plants effective and efficiently. So, the idea is to develop an autonomous irrigation system to water plants with which we can automatically water the plants by understands and calculating the primary parameters like plant genetic information, moisture in the soil, humidity in atmosphere and secondary parameters like temperature and electrical conductivity of soils. The realistic approach of our project comes in a long run, but it will create a benchmark for the initiation of connecting the edge technology of INDUSTRY 4.0 with global challenges of today. Project Green-Globe delivers the essential requirement i.e., growing the plants effectively and efficiently by regulating the Over-Watering and Under-Watering. The outcome also addresses to saving the water and conscious usage of the water while watering plants at houses and other areas.
The developed system is able to regulate the water wastage, and is able develop ML and AI models from understanding the plant's genetic information and the rate of it's growth, and also using climatic conditions which were collected via Internet APIs and cloud. The developed models helps to perform better autonomous irrigation methods, and could also be helpful at concepts of terraforming other planets.
Smart City
Turkey: Smart Garbage Containers to Reduce Fuel Consumption Caused by The Frequency of Solid Waste Collection
EM018 »
The aim of this project is to reduce fuel consumption in the waste collection process, with smart garbage containers. Smart garbage containers will send the waste bin fill-level information to the cloud, and the garbage collection vehicles will reschedule and optimize the waste collection route. In this way, garbage collection vehicles will not enter the areas where unfilled containers are located, so unnecessary fuel consumption will be prevented. Smart garbage container also detects the temperature and gas emissions that are above normal by its sensors and send a warning so that threatening garbage can explosions can be detected and prevented in advance. The fill-level of the smart garbage containers is detected by the distance sensors in the garbage container. The sensor measures the distance between the cover and the wastes. When the measured distance falls below a certain level, it sends the information to the cloud that it is full. Volatile Organic Compound Gas detector will be used to measure methane gas emission, and a thermocouple system will be used to measure temperature.