 Autonomous Vehicles
Autonomous Vehicles
Drone package delivery safety in turbulent atomospheric conditions in confined areas like cities
AS038 »
We believe the wide adoption of drones to replace current CO2 emitting delivery vans will contribute to a significant reduction of carbon additions to the atmosphere. However, if drones are not able to be adopted safely this valuable reduction of carbon emissions will not be realized. Our project combines the technologies of an FPGA, embedded processor, analog sensors and cloud communications to enable the wide and safe adoption of drones to replace traditional CO2 emitting delivery systems.
We will demonstrate an FPGA + Processor + Sensor technology that enables a scout drone to detect atmospheric upsets such as turbulence generated around buildings in windy conditions or city thermals. Atmospheric upsets of drones can cause drone loss of control (LOC), collisions between drones, and collisions with buildings or people. The scout demonstration will send near real-time turbulence location data via the cloud to cargo drones to ensure safe delivery of packages with a reduced hazard to third parties.
The key technology of turbulence and upset detection for prevention of LOC has already been developed by Foale Aerospace Inc and has been developed as a solar powered sensor system that can be attached to flying vehicles without aircraft wiring or integration. We were awarded 3rd prize by the Experimental Aircraft Association Founders Prize competition to produce solutions to prevent Loss of Control, by expert judges at Air Venture 2021 at Oshkosh, Wisconsin.
We propose to add FPGA signal processing to improve performance, reduce detection times and reduce false positive signals from our system. We propose a cloud interface will allow near real-time (a few seconds latency) hazardous conditions detected by a light scout drone to change the flight path of a cargo drone and prevent a hazardous or unsafe outcome.
We have experience in Verilog, Quartus and Modelsim targeting a Terasic DE0-Nano with a Raspberry Pi Zero processor interface written in Python, as well as Yosys/Arachne-pnr/IceStorm toolchain for Trenz Icezero iCE40 FPGA. We have 30 years of programming experience with C and C++. We will use this experience to breadboard a flight system onto the Terasic-Intel-Analog Devices-Microsoft InnovateFPGA platform. Real flight data recorded during light drone aircraft flights in turbulent and calm conditions will be used to demonstrate the identification of atmospheric conditions that cause aircraft upsets using the InnovateFPGA platform as if it were mounted on a scout drone. Communication hazard bulletins via the cloud to the cargo drone will be demonstrated via a wi-fi link to a raspberry pi based processor mounted on a wheeled rover, to demonstrate hazard bulletin reception and responsive action by a cargo drone in flight.
 Water Related
Water Related
River Guardian
AS039 »
The high level of river pollution in industrial and metropolitan environments negatively impacts the ecosystem and raises the government's cost of maintenance and cleaning of those areas. A significant number of rivers, though, are never or rarely cleaned since there is not enough data about their pollution level, nor where the garbage foci are. Hence, a significant portion of all the river waste worldwide is never discovered. It remains unattended, increasing environmental degradation and furthering the impunity of bad actors that pollute rivers without having their actions put to judgment.
We propose a river waste monitoring system composed of an UAV equipped with an image capturing and processing device based on a FPGA. The proposed system also includes support stations with solar panels that will send the collected data to a cloud application while also sending data back to the UAV about its energy status.
The UAV will be capable of flying over the river waters and the riverbank in search of waste. It will also have a small compartment onboard, that will be used to collect water samples, which will then be sent back to a support station for testing.
The support stations will aid the UAVs by collecting solar energy to charge them and analyzing the water collected by the UAVs.
The cloud application will have a dashboard that will display the garbage accumulation spots on a map alongside pictures of the trash and historical data.
The FPGA is an essential part of the system because it will provide the computing power and precision needed for the obstacle and waste recognition algorithm to work in real-time while also being energy-efficient.
The project's expected outcome is to have a relatively low-cost, self-sustainable autonomous system that can be easily deployed on various rivers and efficiently map the river and riverbank area for garbage accumulation spots while also assessing the water quality. This system will provide the local government and agencies with real-time and detailed data about the river's health and waste accumulation spots. Furthermore, the data gathered will be valuable in policies and efforts to restore the river's condition and educate the local community about correct waste disposal practices and other ways of ensuring the nearby river's well-being.
 Autonomous Vehicles
Autonomous Vehicles
Autonomous Pick & Place Robot
AP095 »
The idea of this project is to create an autonomous pick and place robot. This robot will do its movement through line follower robot using IR sensors. The main function of this robot is to pick an object and place it on a desired place; it will select its destination through QR code scanning e.g. there’s a box at X place and a rack at Y place, the robot will scan the QR code of the box at X place. After scanning, next step will be the selection of placing the carried object; robot will select its dropping place after going through the program designed in it using Arduino. Now that our path and dropping place has been selected, object will be placed at Y place as the scanned box belongs to it.
 Other
Other
Crisis
AP096 »
One of the major issues that we are facing today is overpopulation which results in food crisis
 Marine Related
Marine Related
Oyster Farm Autonomous Monitor
AS040 »
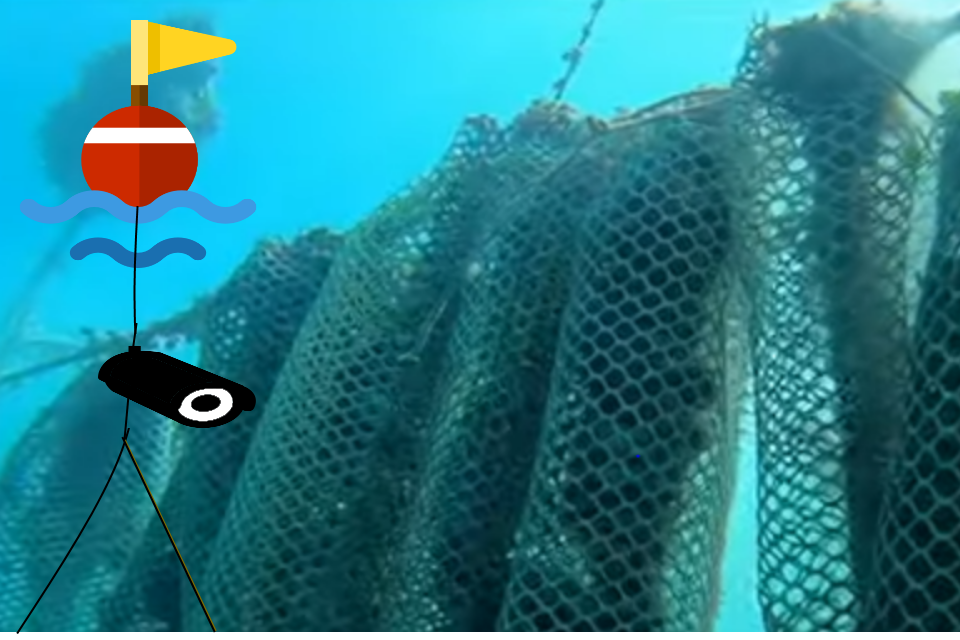
An oyster farm monitor system to detect when cleaning or repair is needed.
The Oyster Farm Autonomous Monitor project will consist of an anchored buoy system that will continuously monitor an oyster farm under the water using video analytics and other sensor data. The data, processed locally on the edge, will determine when oyster bed cleaning or repairs are due as well as produce alerts in the case of extreme swells or possible theft. Other sensor data such as pH level, water temperature, ambient temperature, and visibility are also added to the AI models to help produce future predictions well in advance of needed cleanings.
Mixing the team member's backgrounds of hardware engineering, marine biology, and consumer product architecture, The Educated Robot team has accepted the GEF SGP Biodiversity proposal of "Mauritius: Improving Livelihoods of Communities - Oyster Farming for Jewelry Making in Rodrigues" to present one solution to help our world. This unique use case is a perfect real world example highlighting the capabilities of edge computing using Intel Edge-centric FPGAs for advanced image processing. Analog Devices plug-in cards are used to gather additional diverse sensor data to be stored and analyzed using Microsoft Azure Cloud Services.
Other: Warm homes and clean air for everyone.
Smokeless Chimney
AS041 »
There are 10 million existing wood stoves in the USA alone. Each wood stove is a gathering place and source of heat when the power goes out. People who use wood stove are a passionate group. We have 2 issued patents and one pending patent. We have developed the components to measure the opacity of the emitted smoke and control the combustion reaction to adjust for a cleaner burn. This will bring wood stoves into the 21st Century.
Autonomous Vehicles
Autonomous Pick & Place Robot
AP097 »
The idea of this project is to create an autonomous pick and place robot. This robot will do its movement through line follower robot using IR sensors. The main function of this robot is to pick an object and place it on a desired place, it will select its destination through QR code scanning e.g. there’s a box at X place and a rack at Y place, the robot will scan the QR code of the box at X place. After scanning, next step will be the selection of placing the carried object; robot will select its dropping place after going through the program designed in it using Arduino. Now that our path and dropping place has been selected, object will be placed at Y place as the scanned box belongs to it.
Smart City
Environmental Humidity Control System Based on RISC-V
PR040 »
Use Intel's FPGA development platform to design an intelligent environment adjustment system driven by a 32-bit RISC-V architecture processor. The system embeds the RISC-V soft core in the FPGA development platform, drives peripheral sensors, and realizes the shortest path optimization algorithm. Finally, it can control the mobile platform in a specific environment and realize the detection and adjustment of environmental humidity with the optimal path. Real-time obstacle avoidance function is realized by distance sensor during movement. In the process of system development, the system will be tested and improved.
Other: Agriculture
Plant Disease Identification Robot
AP098 »
In order to overcome the major problem, Diseases in plants. A robot is designed that detects the leaf disease using image processing and Machine learning is deployed. The robot is build using a controller known as Raspberry pi 3 and the Raspberry pi 3 is interfaced with motor driver L293D which operates the geared motor. The robot is controlled via IoT using Blynk app an android mobile application which is interfaced with Raspberry pi unique Token. This Blynk app controls the entire operation of the robot which is integrated with machine learning model. We have interfaced Multispectral image sensor integrated with CMOS spectral filter which captures image data at specific frequencies across the electromagnetic spectrum. VNC viewer (Virtual Network Computing) software used to access Raspberry pi 3 operation. By using the IP address of the raspberry pi 3 we can login in any device to access and control the performance. The robot moves towards the plant and captures the RGB image along with raw reflectance NIR (near-infrared) and Rededge images of the leaves. The captured image is stored and also monitor the farm lively via IoT using the camera interfaced in the robot from anywhere on any device and an HTML web page is developed to diagnose plant and check whether the plant leaf is healthy or infected. Once the image is captured the URL is generated and performs to convert NIR and REDEDGE images to NDVI (Normalized Difference Vegetation Index) then it provides the image within the web page which diagnosis the leaf with the given dataset using CNN algorithm and finally it concludes that the plant is healthy or infected with plant name and disease name in VNC viewer.
 Autonomous Vehicles
Autonomous Vehicles
Gesture Recognition Accelerator
EM032 »
Nowadays, the number of network-based devices (IoT
devices) has been increasing. They can be controlled by
other network-based smart devices such as smartphone,
personal computer or personal assistant robots, and so on.
These systems or devices should have user-friendly interface design. In this project, we propose easy-to-use and
intuitive user interface design for them. We employ gesture controlling UI.
Food Related
Albania: Smart and IoT solutions for agriculture and farming
EM033 »
Summary: Provide smart farming technologies and IoT for all type of greenhouses and farms.
Details: The project will consist in gathering greenhouses and/or farms sensors data into a central device that acts as an IoT gateway. Pest and Plant diseases data will be recorded to Azure storage and insight analysis using Machine Learning techniques will be used to classify the recorded diseases. An inference model will be generated and transmitted to the IoT Gateway (DE10-nano) for local and immediate determination of plants conditions to enable further control actions. The inference model will consist of neural networks parameters from which a neural network IP Core will be reconstructed in the FPGA portion of the cyclone V SoC device found in the DE10 board. The HPS side will handle the communication with the sensors and with the cloud, and the azure cli C libraries will be installed to enable the communication with azure cloud.
The project aims to minimize the time taken to manage the farm or greenhouse operations (data collection, analysis and insight, control actions) as well as to avoid the excessive use of chemicals.
Smart City
A
AS042 »
A