 Smart City
Smart City
Automatic garbage classification management system
PR025 »
本项目通过图像识别检测医疗垃圾类别并对其进行分类投放。通过医疗垃圾分类尽量实现医疗废物再利用,节约资源,同时减少对环境的危害。
 Smart City
Smart City
Intelligent Pavement Damage Detection System for Urban Roads
PR033 »
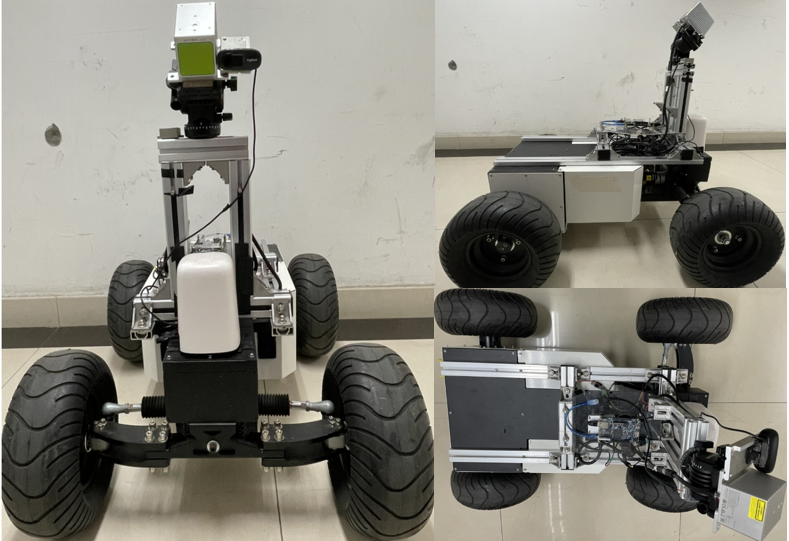
Pavement damage on urban roads not only affects the appearance of the road surface and the comfort of driving, but also easily expands to cause structural damage to the road surface and shorten the service life of the road surface. If it is not repaired in time, it will cause local accelerated damage to the road surface, cause serious traffic accidents, and cause a large number of personal injuries and economic losses. In order to reduce such injuries and realize the sustainable use of urban roads, reasonable and timely road maintenance and management are particularly important, and road damage detection is the primary task of road maintenance and management. Therefore, this project designs an intelligent road damage detection system for urban roads based on 3D lidar and cameras, collects and analyzes road data in real time, and gives the damage results objectively and accurately.
The intelligent road damage detection solution we conceive uses multi-sensor fusion and uses FPGA edge hardware to accelerate processing and upload to the cloud server instead of manual detection. It can display the GPS location of road damage in real time, as well as accurate detection results. In addition, the road surface can be spliced to form a vectorized map, and the road surface condition index PCI can be calculated according to the size and shape of the defect, and maintenance personnel can be notified to make timely repairs.
 Smart City
Smart City
ITHS, Interactive Temperature and Humidity System
PR021 »
這個專案預計製造了一個新的HVAC系統,此系統可針對每個人的特定喜好及感受來調整輸出之設定,使同一場域內不同位置之使用者都能感受到舒適的溫度,並保持能源成本最小化。
這個專案使用DE10-Nano Cyclone V SoC FPGA Boar作為主控制器,利用Humidity and temperature sensor獲取環境之資訊,如溫度與濕度,而太陽輻射資訊經由太陽能板或Ambient Light Sensor接收,將類比電壓透過Analog Devices plug-in boards的DC1012A-A轉換為數位訊號輸入至控制板,除此之外,此專案也會藉由感測器讀取人體之體溫、心跳速率等資訊並將其透過藍芽或Wifi module輸入至控制板,最終將獲得之資訊利用Microsoft Azure IoT儲存於雲端或是進行大數據的分析與運算,在使用者感受的方面,本專案預計設計一操作簡單之APP介面,供使用者選擇其目前對於溫度的感受以及自身的喜好設定。
 Smart City
Smart City
Digital Twin System Applied to Mobile Robots
PR038 »
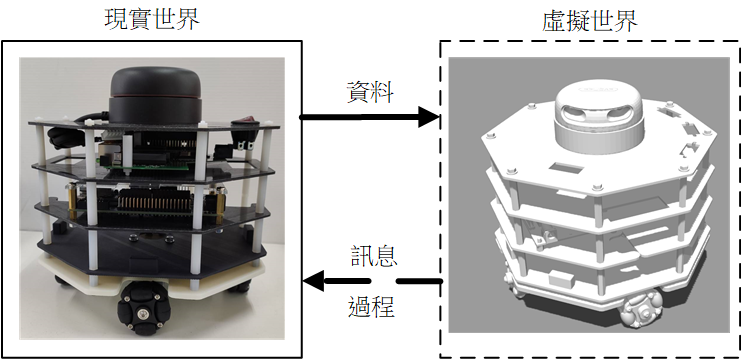
This project proposes a digital twin system design method applied to mobile robots.
This method enables synchronized actions between real and digital mobile robots. The
real robot system designed in this thesis uses DE10-Nano board as the main hardware controller, which has the advantages of low cost and low power consumption. The digital robot is built in the Gazebo simulator, allowing the robot simulation can have high-quality rendering effects and high-performance motion performance.
In this project, both real and digital robots use Robot Operation System (ROS) as the main operating system. At the same time, the digital twin robots will also transmit data and communicate through ROS. By collecting the motor voltage and current signals of the real robot and the encoder speed, the fuzzy clustering (FC) method is used to establish a fuzzy identification system of the motor. Then applies this motor fuzzy identification system to a digital robot, so that the digital robot can simulate the state of a real motor.
 Smart City
Smart City
Smarthome Control System
PR009 »
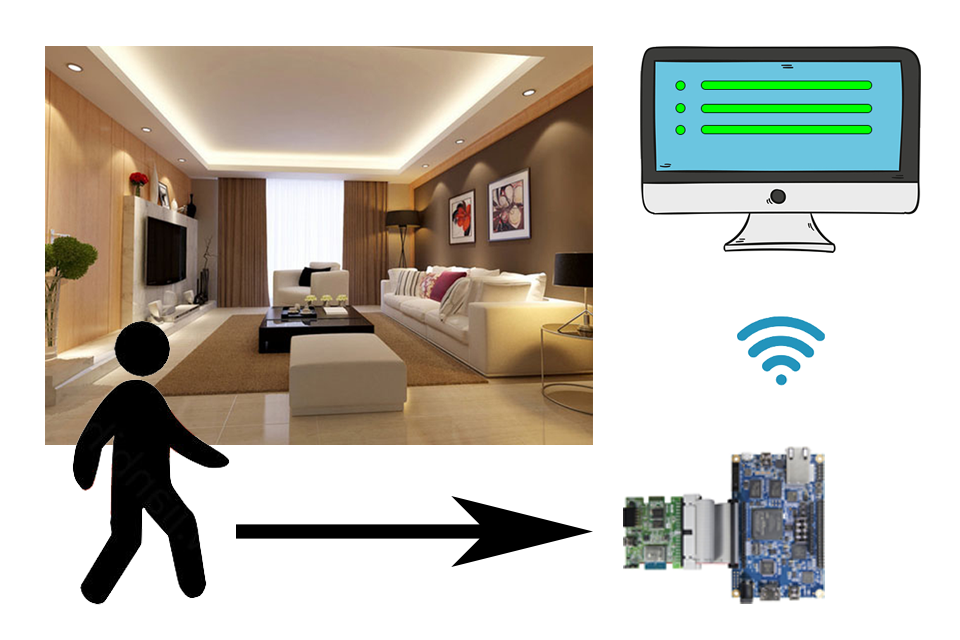
Smart home has become a trend of housing in the future. At present, most smart home control systems are closed systems developed by major developers. With specific interfaces and communication protocols, they cannot be well managed when they have problems like not receiving real-time data from sensors when there are too many devices.
The design is intended to implement smart home control and data acquisition in the house covered with Wi-Fi with FPGA Cloud Connectivity Kit platform based on DE10-Nano. Data monitoring and smart home remoting control functions are implemented with Microsoft Azure IoT and AI tools in cloud.
 Smart City
Smart City
Self-Steering Pan-tilt Based on Sound Source Localization
PR013 »
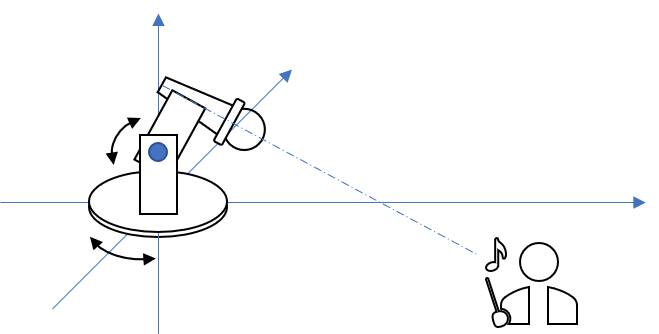
Cardioid directivity microphone has good performance and is used in many scenarios, but it has to adjust its direction when the sound source moves. Or in a videoconferencing system, the camera always need to point to the speaker. Sound source localization (SSL) technology will be used as a guidance to control the pan-tilt carrying the microphone or the camera or something else to point to the sound source. Echo cancellation (EC) and beam forming (BF) will be used to enhance the signal quality. SSL, EC and BF technologies will be developed in Intel FPGA configured with a microphone array. Analog Devices plug-in boards will be used to control the motors for pan-tilt adjusting.
 Smart City
Smart City
smart home
PR015 »
智能家居控制系统,是以智能家居系统为平台,家居电器及家电设备为主要控制对象, 利用综合布线技术、网络通信技术、自动控制系统、音频技术等将家居生活有关的设施进行高效集成,提升家居智能、安全、便利、舒适,为我们的生活带来很的方便性。
Smart City
智能安防中的异常行为检测
PR016 »
基于FPGA和云端计算的智能安防系统。
在数据端利用FPGA实时对摄像头采集到的图像数据预处理,然后将处理后的信息传入云端,利用云端训练好的AI模型中进行异常行为判断,然后将判断结果返回到FPGA数据端进行警示,报警等相关操作。
Smart City
基于FPGA的视觉SLAM实现及部署
PR017 »
采用FPGA计算SLAM算法中计算量最大耗时最多的图像特征点提取模块,对图像特征点的提取进行加速,然后将计算后的图像数据传入视觉SLAM算法中,使其具有更好的实时性和更低的能耗
 Smart City
Smart City
桥梁裂缝动态监测系统
PR019 »
桥梁作为当今重要的交通枢纽,与行车的安全与畅通息息相关,它的正常运行能极大地推动经济的发展,促进社会的进步。随着时间的推移,外力的反复碾压及雨雪、洪水、冰冻、地震等这些自然因素的影响,必然会严重影响桥梁的安全和寿命,导致脱层和混凝土开裂,甚至会引发桥梁坍塌,造成不可挽回的经济损失和人员伤亡。
因此,及时检测并修复桥梁的已有损伤,保证服役桥梁在工作时的健康安全的状态,已经成为广大桥梁工程界研究者亟需解决的热门问题之一。由于裂缝是混凝土桥梁病害中破坏较为严重、威胁较大的一种,所以必须对桥梁裂缝进行监测,及时发现并修补,控制裂缝的产生、扩展,将其控制在合理的允许范围内,从而避免桥梁倒塌事故。
本系统针对桥梁裂缝的动态监测系统进行研究,采集桥梁上裂缝的微距图像并实时计算裂缝的宽度,同时监控桥梁上的行车情况,采用多传感器融合的方法,分析桥梁在各种荷载作用下,裂缝的开展和恢复状态,将其控制在安全合理范围内,为桥梁的安全运行服务。其意义有三:1)监测裂缝是否发生变化;2)监测桥上车辆行车状态;3)分析荷载对裂缝的影响。
Smart City
导盲小车控制系统设计
PR022 »
导盲小车控制系统设计是指通过导盲系统将周围环境中阻碍盲人出行的障碍物进行检测,通过语音提示盲人安全通过障碍物。导盲小车控制系统,运用超声波模块对周围环境进行实时检测,具有障碍物检测精准,检测效率高等特点,通过语音提示,帮助盲人安全外出。通过电子罗盘,告知盲人应当行进的方向。且结合了物联网+智慧城市的城市发展趋势,与了社会的发展相结合。同将红绿灯信息传给导盲小车,提示盲人安全的通过十字路口。
 Smart City
Smart City
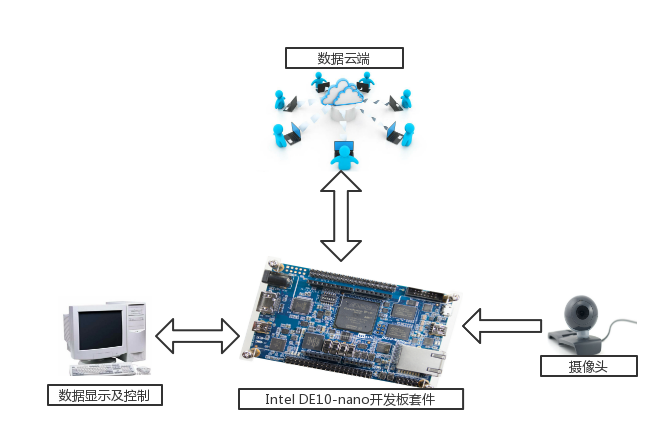
基于FPGA的智慧教室系统
PR027 »
随着无线通信、云计算技术、人工智能技术的不断发展和成熟,物联网被广泛应用于各个产业领域,建设面向智慧校园、智慧教室的物联网云平台在高校迅速发展起来。为此我们设计并制作了一款利用Intel DE10-nano现场可编程逻辑平台的智慧教室系统。本系统充分利用了Intel DE10-nano中FPGA与ARM的高速并行运算的优势,通过在Intel DE10-nano现场可编程逻辑平台上移植linux操作系统,在其中运用人工智能技术,将摄像头对课堂的实时监测画面进行AI算法处理。处理后将识别出当前课堂学生数量,每位学生信息,并通过识别学生动作,判断出学生是否举手,是否在睡觉,是否存在在玩手机等行为,最后将所识别信息通过intel FPGA Cloud Connectivity Kit即英特尔FPGA云连接套件上传到云端,帮助教师对学生进行云端监控,实现了教师维持课堂秩序的便捷管理功能。