 Smart City
Smart City
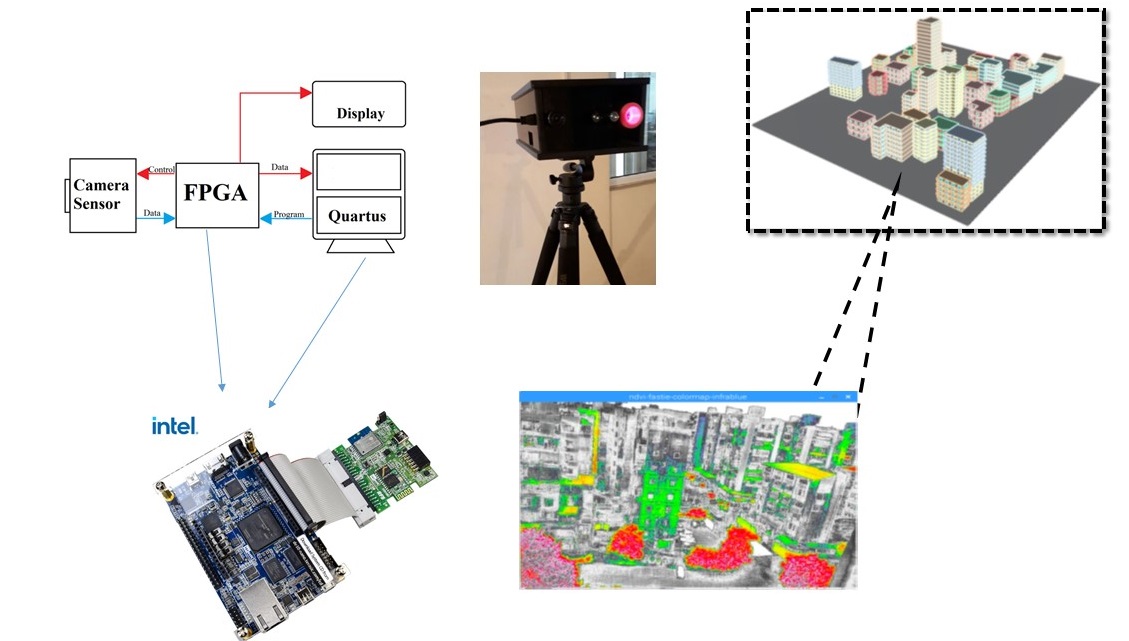
NDVI device for building building monitoring
EM031 »
We have developed a platform to measure and visualize Normal Difference Vegetation indices using a low cost Camera and a DE2 board. This device was tested on building facades showing building moisture that can be related to the inhabitant health. In a different project we have studied around 17000 buildings in Beirut to build and energy model, the simulation was run on Azure. In this proposal we try to merge the two concepts/techniques.
 Marine Related
Marine Related
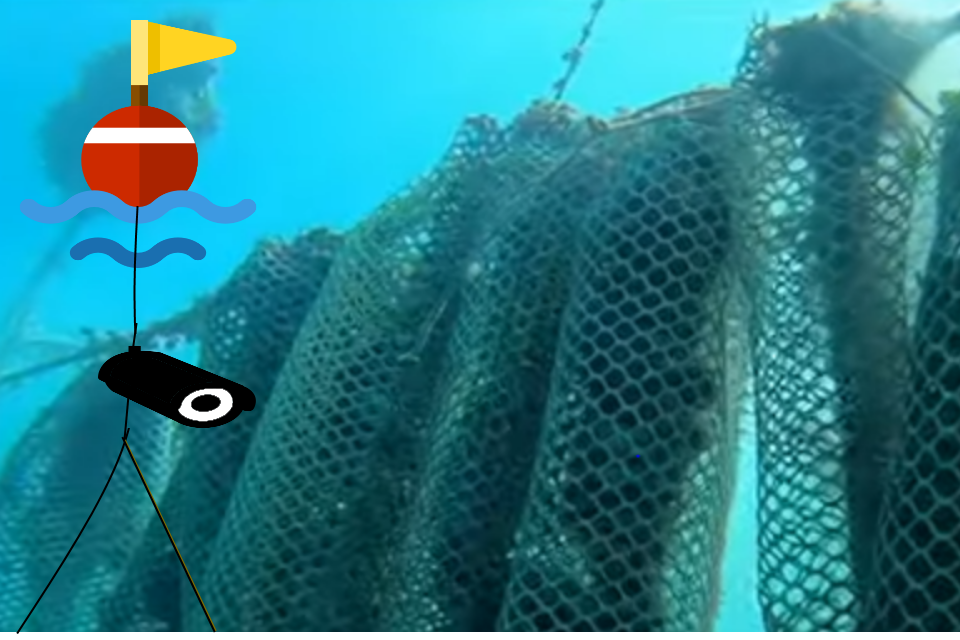
Oyster Farm Autonomous Monitor
AS040 »
An oyster farm monitor system to detect when cleaning or repair is needed.
The Oyster Farm Autonomous Monitor project will consist of an anchored buoy system that will continuously monitor an oyster farm under the water using video analytics and other sensor data. The data, processed locally on the edge, will determine when oyster bed cleaning or repairs are due as well as produce alerts in the case of extreme swells or possible theft. Other sensor data such as pH level, water temperature, ambient temperature, and visibility are also added to the AI models to help produce future predictions well in advance of needed cleanings.
Mixing the team member's backgrounds of hardware engineering, marine biology, and consumer product architecture, The Educated Robot team has accepted the GEF SGP Biodiversity proposal of "Mauritius: Improving Livelihoods of Communities - Oyster Farming for Jewelry Making in Rodrigues" to present one solution to help our world. This unique use case is a perfect real world example highlighting the capabilities of edge computing using Intel Edge-centric FPGAs for advanced image processing. Analog Devices plug-in cards are used to gather additional diverse sensor data to be stored and analyzed using Microsoft Azure Cloud Services.
 Autonomous Vehicles
Autonomous Vehicles
Gesture Recognition Accelerator
EM032 »
Nowadays, the number of network-based devices (IoT
devices) has been increasing. They can be controlled by
other network-based smart devices such as smartphone,
personal computer or personal assistant robots, and so on.
These systems or devices should have user-friendly interface design. In this project, we propose easy-to-use and
intuitive user interface design for them. We employ gesture controlling UI.
 Smart City
Smart City
Waste Management Monitoring System
AP103 »
This project is about a smart bin that can detect whether the bin is full or not. The status of each bin will be informed to the collector so that he can collect the bins which are full according to the sensor data.
 Marine Related
Marine Related
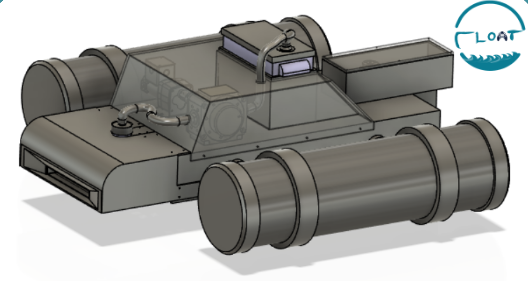
Float-E: Surface Water Oil-Collecting Robot
AP105 »
The potential risk for large-scale oil spills to occur can lead to devastating results, causing both environmental and economic damages that can take several years to clean up and recover. With the existence of offshore rigs and the constant transportation of oil around the world each year, more autonomous and efficient ways of handling these impacts were explored. This project proposes a semi-autonomous robot to alleviate the problem, exploring the use of image processing to locate and collect these hazardous spills; making use of a pump to collect and store these spills into an oil container; coconut husk as a more cost-effective solution to filtering the oil from excess water. In addition, the fabrication method touches on 3D printable parts combined with PVC pipes that act as pontoons to keep the robot afloat.
Aside from utilizing the provided FPGA Cloud Connectivity Kit and Microsoft Azure IoT, a variety of software tools were used to ensure the feasibility of the robot’s main components; SolidWorks, to calculate and guarantee the proper buoyancy and stability of the design; CoppeliaSim, to demonstrate the robot's pathfinding and obstacle avoidance through three environments, no obstacles, static objects, and dynamic obstacles; Arduino, for the actuation and mobility of the robot; Python in designing the oil detection system using HSV color space and Haar Cascade; user interface platform, created in PyQt5, to enable user interaction in controlling the oil detection and manual movements of the device. The coordinates of the oil are sent to the Arduino via serial communication; once the Arduino receives the data, it adjusts the DC and servo motors depending on the x and y values; this includes the LED light to simulate the vacuum. Moreover, experimentations made on coconut husks were to ensure that oil may be filtered out from the water. In the development of a semi-autonomous surface water oil-skimming robot through various means of simulation and experimentation, it can be utilized to substitute manual labor to clean a body of water by having the robot device collect and store the optimal amount of oil in a locomotive manner.
Other: AGRICULTURE
SOIL MONITORING BOT FOR SMART AGRICULTURE
AP106 »
Agriculture plays the major role in economics and survival of people in India. The purpose of this project is to provide embedded based system for soil monitoring and irrigation to reduce the manual monitoring of the field and get the information via mobile application. The system is proposed to help the farmers to increase the agricultural production. The soil is tested using various sensors such as NPK sensor, pH sensor, temperature sensor, and humidity sensor. Based on the result, the farmers can cultivate the appropriate crop that suits the soil. The obtained sensor values are sent to the database through Wi-Fi router and date and time is noted in the database and also a notification message is sent.
 Smart City
Smart City
IoT Pollution Box System with ML Processing
AP109 »
With climate change showing real and measurable effect on our daily lives with increase in extreme natural calamities, planning for a sustainable future has become a nessasity. To solve a problem of this scale, one needs to understand it fully first. To understand the extent of our effect on a climate a easy to use and distribute measuring units will be crucial. We will be tacking this problem.
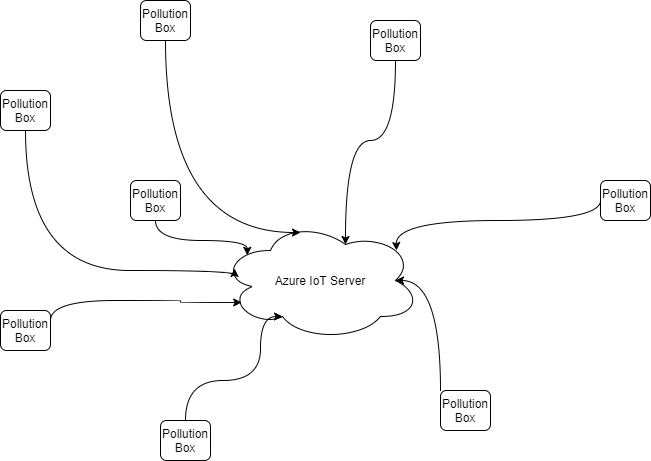
A end-to-end Pollution Detection system with Machine Learning Predictions will be designed. It will consists of two major part. Client-Side Pollution Box which will be compact and fully integrated with various sensors and modules to detect Air, Water, Light, Noise Pollution Parameters and Server-Side Cloud Processing Center which will use ML based systems to find patterns and correlations between various pollution parameter and how they are affected with weather conditions. The project will provide a easy to replicate system which can be used by concerned authorities in the Metropolitan areas to monitor and curb pollution on a real-time basis.
Pollution Box will contain a Camera, Microphone, Air Quality and Gas Sensor, Water TDS and Turbidity sensor, which will be used to create a Holistic Pollution Parameter which will be used to build a fully contained pollution index.
Camera will be used to scan the night sky and provide a light pollution metric which can be used to further plan the areas street light consumption. Microphone will be used to provide a all-day look at the noise pollution and can issue mental health warning if exceeding the researched paramter. Air Quality and Gas Sensors can be used to provide a accurate Air Quality Index. Whereas resistivity based TDS calculation can identify increase in toxicity and salinty of water on a real-time basis.
Making the Pollution box compact and easy to use will make it easier for the authorities to make a mesh of these IoT enabled boxes that can give a better resolution in detecting the problem areas and solving the issue at a larger scale and thus ensuring the sustainble future.
At the server end the data will be processed and Machine Learning based program will find patterns and correlation between different parameters to further our understanding on the effects of pollution.
Other: Agriculture related
Assessment of seed quality using image processing with fpga
AP110 »
We are going to check the quality of the seed using image processing. We will use fpga and interface the camera with it to get the output.
 Food Related
Food Related
Sustainable Mushroom Farming
AP111 »
In Malaysia, mushroom cultivation activity has been long existed. Mushrooms have been identified as one of the high-value commodities under Malaysia’s National Agro Food Policy (2011-2020). The government recognizes the mushroom industry to have a potential to be developed as demand is increasing in tandem with the increase in population and consumption. Currently, the cultivation activity is growing and thriving due to high demand in Malaysian market. The consumption of mushrooms per capita has been expected to increase from 1.0 kg in 2008 to 2.4 kg in 2020. Besides, there were 648 mushroom entrepreneurs in Peninsular Malaysia in 2008. The higher demand together with the supports from government to improve this industry in future, has gave an opportunity to entrepreneurs to keep venturing in this area. The demand of mushroom is increasing but in Malaysia, the number of cultivators and production is decreasing. This is due to the inconsistent environmental condition with high temperature of 32–35 °C and low humidity of 60%–70%.
Humidity and temperature affect on fruiting body of oyster mushroom. Optimal temperature and humidity is known as 13-16°C and > 80%. High and low temperature indicates > 16°C and < 12°C, respectively and high and low humidity indicates > 80% and < 60%. The morphology of the mushroom depends on the humidity and temperature. Oyster mushroom also can grow at moderate temperature ranging from 20℃ to 30 ℃.
In Malaysia, some studies have been conducted and results show that in a room temperature, the optimum humidity should be larger than 90% in order to get the optimum growth and yield of mushroom. Due to the high demand in our country and also in the world, the industry requires high technology that uses less labour but produces higher productivity. Hence, electronic based monitoring system should be developed to maintain the humidity as high as 90% at room temperature and the data must be sent to cloud for further development. Mushroom farmers can view the temperature and humidity data remotely and watering process can be done automatically to maintain the humidity. Information or database is also important since the number of mushroom entrepreneurs keep increasing due to the demand and support from government. Besides the hardware, the software also should be developed to ensure that the mushroom industry will be sustained and growing. The Graphical User Interface (GUI) must be attractive and informative since it will be a medium of communication among the mushroom entrepreneurs, mushroom farmers and government agency.
Food Related
An FPGA-based Solution to monitor the Quality of Agriculture Produce
AP115 »
To minimize the losses that occurred during the storage process of farm produce (vegetables and fruits) by deploying sensor-based IoT technology to monitor and record essential and relevant parameters such as temperature, humidity, freshness indicators, etc.
This project will improve the profitability and customer satisfaction in the fresh produce industry and empower small-scale producers, shippers, and retailers with actionable data to optimize post-harvest inventory rotation and routing decisions.
 Water Related
Water Related
Wastewater Detection
AS046 »
Our project will be based around wastewater detection in rivers and lakes. Specifically we will be testing in the Pittsburgh rivers region because in times of heavy rainfall, waste tends to end up in the rivers due to infrastructure problems. Our device will be able to tell the concentration of wastewater in the location where the sensor is placed.
Autonomous Vehicles
Autonomous Vehicle Speed Control on Heterogeneous Road ways
AP120 »
Road accidents have been very common in the present world, with the prime cause being careless driving and exceeding the speed limit. The necessity to check this has been very essential and different methods have been used so far. However, with the advancement in technology, different governing bodies are demanding some sort of computerised technology to control this problem of overspeed driving. Although all highways do have signboards indicating the maximum speed limit for the sake of the driver’s safety, people still do not obey the highway speed limit.
In this project, the speed of the vehicle is controlled through a continuous scanning of the signboards indicating the maximum speed limit on the roads and locking the maximum speed of the vehicle to the scanned value. By making use of a camera mounted to the vehicle pointing towards the left side of the road, the signboard image is captured. The camera captured an image of the speed limit signboard that was processed on the FPGA board for character recognition by using the optical character recognition (OCR) method. This value is compared with the database to lock the speed of the autonomous vehicle. The complete information of the autonomous vehicle with respect to speed maintained throughout the journey is monitored remotely over the IoT cloud for further enhancements and speed updates along the route.
Even in some areas where we do not find any speed limit boards, especially for these situations, we came up with an additional feature that consists of data pertaining to the speed of different vehicles in different types of lanes are not unique and classified based on the type of vehicle and carriage ways. As an illustration, for carriage type motor vehicles with no more than eight passengers, the maximum allowable speed on an expressway for plain terrain is 120km/h, where as it is 70km/h on municipal roads. Through such data, we propose a speed control system for controlled autonomous driving on any type of road and any type of terrain. The vehicle in which this control method is adopted initiates the journey with tracking using a GPS tracker provided in it. At the start of the journey, the user can select his/her destination point based on the estimated distance as well as the type of roads involved a priori. It shows what lanes are included in that path and respective vehicle speed limits saved as reference. If the vehicle finds any speed limit signboard on the journey, it compares with the data available. The priority for the database of the lines and respective speeds is given when there is no signboard in the way of a vehicle. This ensures the continuous control of the autonomous vehicle in both online and offline situations for all types of roads.