 Smart City
Smart City
Automatic garbage classification management system
PR025 »
本项目通过图像识别检测医疗垃圾类别并对其进行分类投放。通过医疗垃圾分类尽量实现医疗废物再利用,节约资源,同时减少对环境的危害。
 Smart City
Smart City
Intelligent Pavement Damage Detection System for Urban Roads
PR033 »
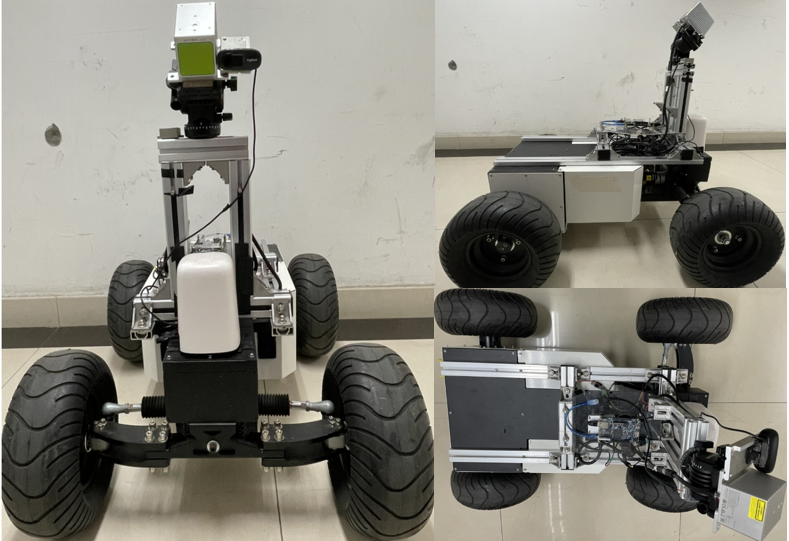
Pavement damage on urban roads not only affects the appearance of the road surface and the comfort of driving, but also easily expands to cause structural damage to the road surface and shorten the service life of the road surface. If it is not repaired in time, it will cause local accelerated damage to the road surface, cause serious traffic accidents, and cause a large number of personal injuries and economic losses. In order to reduce such injuries and realize the sustainable use of urban roads, reasonable and timely road maintenance and management are particularly important, and road damage detection is the primary task of road maintenance and management. Therefore, this project designs an intelligent road damage detection system for urban roads based on 3D lidar and cameras, collects and analyzes road data in real time, and gives the damage results objectively and accurately.
The intelligent road damage detection solution we conceive uses multi-sensor fusion and uses FPGA edge hardware to accelerate processing and upload to the cloud server instead of manual detection. It can display the GPS location of road damage in real time, as well as accurate detection results. In addition, the road surface can be spliced to form a vectorized map, and the road surface condition index PCI can be calculated according to the size and shape of the defect, and maintenance personnel can be notified to make timely repairs.
 Smart City
Smart City
ITHS, Interactive Temperature and Humidity System
PR021 »
這個專案預計製造了一個新的HVAC系統,此系統可針對每個人的特定喜好及感受來調整輸出之設定,使同一場域內不同位置之使用者都能感受到舒適的溫度,並保持能源成本最小化。
這個專案使用DE10-Nano Cyclone V SoC FPGA Boar作為主控制器,利用Humidity and temperature sensor獲取環境之資訊,如溫度與濕度,而太陽輻射資訊經由太陽能板或Ambient Light Sensor接收,將類比電壓透過Analog Devices plug-in boards的DC1012A-A轉換為數位訊號輸入至控制板,除此之外,此專案也會藉由感測器讀取人體之體溫、心跳速率等資訊並將其透過藍芽或Wifi module輸入至控制板,最終將獲得之資訊利用Microsoft Azure IoT儲存於雲端或是進行大數據的分析與運算,在使用者感受的方面,本專案預計設計一操作簡單之APP介面,供使用者選擇其目前對於溫度的感受以及自身的喜好設定。
 Food Related
Food Related
农作物生长环境数据探测器
PR031 »
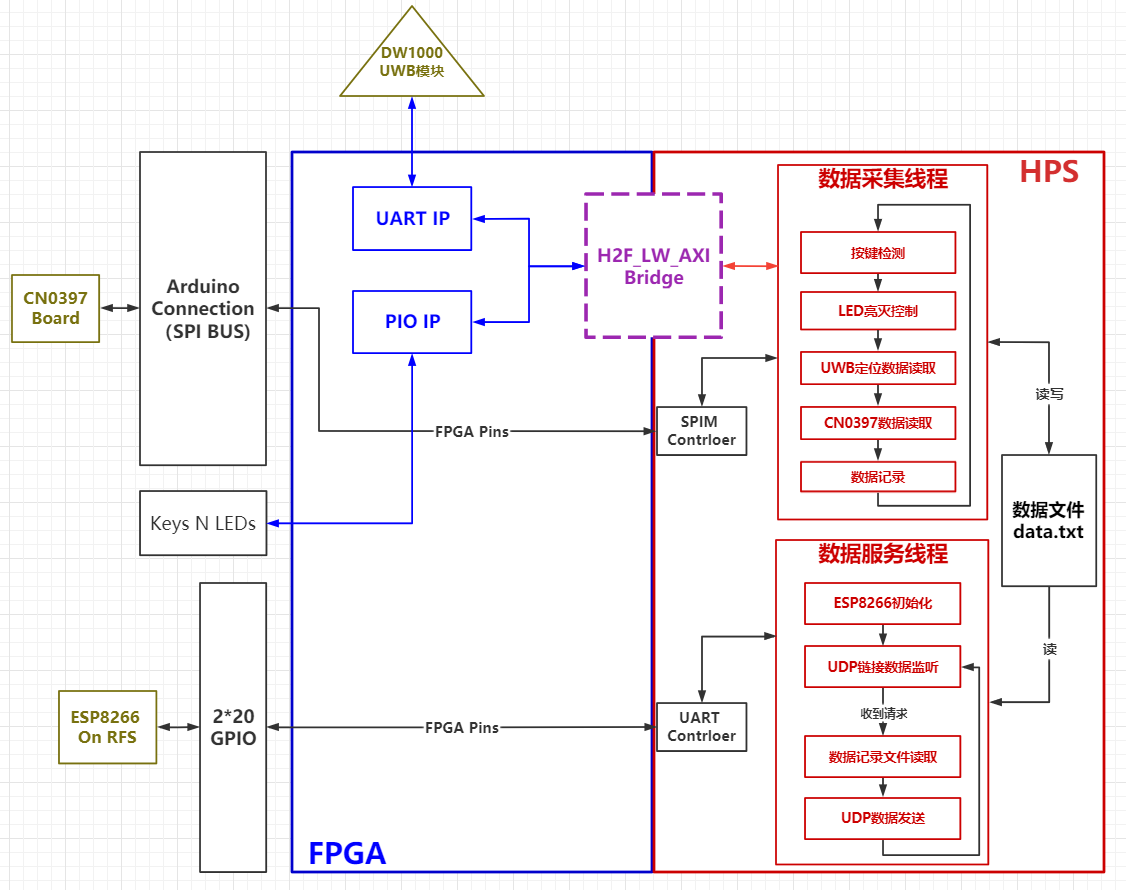
项目将开发一种农作物生长环境数据探测器,使用云连接套件并搭载ADI提供的土壤水分、pH 值和温度测量评估板和3通道光检测评估板,去田园的农作物之间采集光、水分、温度、湿度、土壤pH值等数据,同时定位采集地点,将生长环境数据连同位置等信息通过Wi-Fi模块上传到Azure LoT。其定位将通过UWB定位模块实现。在云连接套件中,Cyclone V的FPGA部分主要用于数据处理、无线通信等,而HPS部分主要用于控制从设备、执行算法,当然这二者之间可以互补,项目将逐步优化,把需要反复执行的数据处理等工作尽量交给FPGA部分,HPS部分则侧重协调调度和控制。本项目的预计使用场景是大规模大棚种植园。
 Health
Health
基于FPGA的手语翻译系统
PR032 »
 Other: floating waste collector
Other: floating waste collector
Self-driving Floating Waste Collector
PR036 »
Our project will be a self-driving boat that collects garbage floating on water. The boat will have a camera mounted on it, which sends image captures to the DE10-Nano board to analyze where, in relation to the boat, the garbage is. The board then controls the motors of the boat to drive it to the waste and picks it up. There will be a Wi-Fi system built-in so that the board can send live video feedback to a connected PC, while also receive commands from the PC to control the boat, in case it goes out of control. The garbage collection is, under most circumstances, fully automated. It uses sensors to detect if the collection is approaching its max capacity, and will return to a set location near land if it does, to dump out the trash and prepare for the next round of garbage collection. We aim to utilize edge computing for image recognition on objects floating on water, to distinguish whether they are actually garbage or not, confirm their location, and compute how to get there.
 Smart City
Smart City
Digital Twin System Applied to Mobile Robots
PR038 »
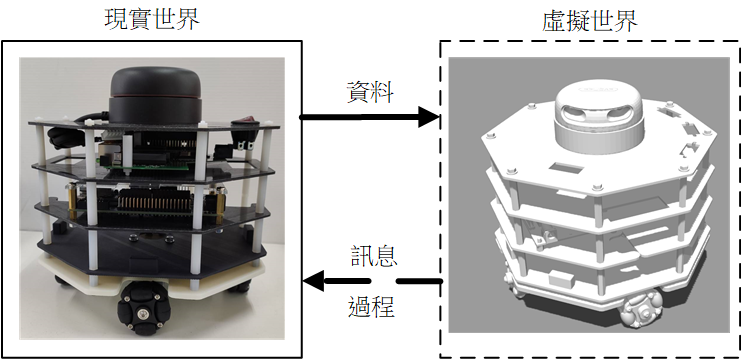
This project proposes a digital twin system design method applied to mobile robots.
This method enables synchronized actions between real and digital mobile robots. The
real robot system designed in this thesis uses DE10-Nano board as the main hardware controller, which has the advantages of low cost and low power consumption. The digital robot is built in the Gazebo simulator, allowing the robot simulation can have high-quality rendering effects and high-performance motion performance.
In this project, both real and digital robots use Robot Operation System (ROS) as the main operating system. At the same time, the digital twin robots will also transmit data and communicate through ROS. By collecting the motor voltage and current signals of the real robot and the encoder speed, the fuzzy clustering (FC) method is used to establish a fuzzy identification system of the motor. Then applies this motor fuzzy identification system to a digital robot, so that the digital robot can simulate the state of a real motor.
 Other: Hardware Acceleration
Other: Hardware Acceleration
輕量型卷積神經網路之硬體加速器設計
PR008 »
本研究提出透過軟硬體協同設計(hardware software co-design)將卷積神經網路(Convolutional Neural Network, CNN)加速器實現於FPGA (Field Programmable Gate Array, FPGA)中的方法。本研究主要分成三個部分來實現:在硬體方面,(1)透過Avalon 匯流排將卷積神經網路模型中的遮罩、權重參數與影像載入至處理單元模組中,進行CNN中卷積與池化的運算,(2)處理單元模組的設計透過平行處理架構提升模組的運算效能,並且透過遮罩與權重的重複使用和定點數運算,有效節省記憶體空間的使用。而在軟體方面,(3)透過NIOS實現CNN中的全連結層,並將此模組與相關硬體模組進行整合,進而實現完整的CNN加速器。從實驗結果可以得知,本文提出的設計架構可以有效提升模型運算效能,並且能夠節省記憶體空間使用量。
 Smart City
Smart City
Smarthome Control System
PR009 »
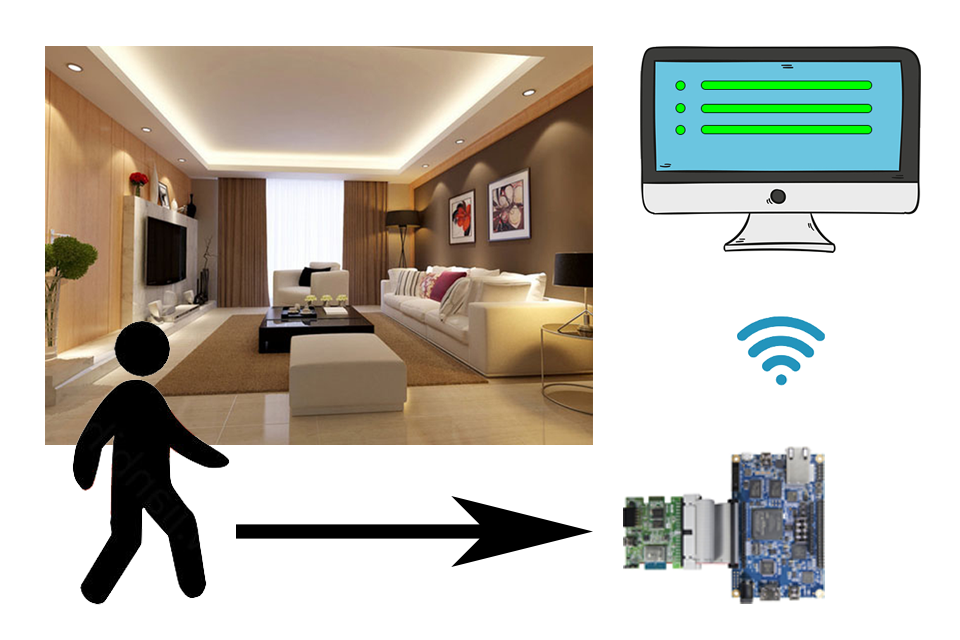
Smart home has become a trend of housing in the future. At present, most smart home control systems are closed systems developed by major developers. With specific interfaces and communication protocols, they cannot be well managed when they have problems like not receiving real-time data from sensors when there are too many devices.
The design is intended to implement smart home control and data acquisition in the house covered with Wi-Fi with FPGA Cloud Connectivity Kit platform based on DE10-Nano. Data monitoring and smart home remoting control functions are implemented with Microsoft Azure IoT and AI tools in cloud.
 Autonomous Vehicles
Autonomous Vehicles
AEB自动紧急制动系统
PR011 »
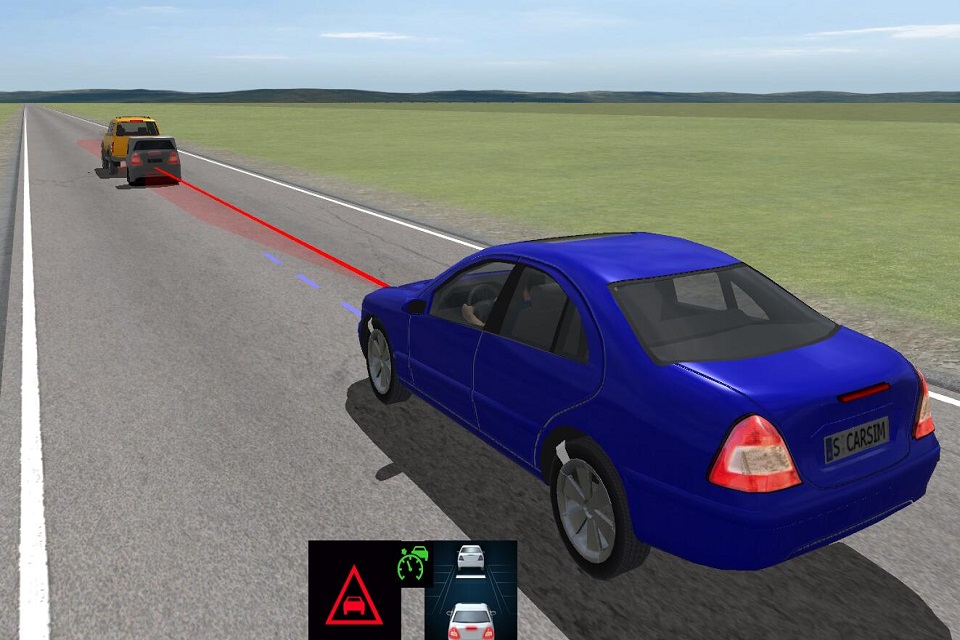
基于车侧的自动紧急制动系统,采用摄像头、毫米波雷达以及人体红外探测器为主要传感器,判断车辆前方出现的人以及其他生物,根据距离等情况进行决策是否进行制动动作。
 Water Related
Water Related
River Water Surface Floating Material Monitoring System
PR012 »
River water surface floating object monitoring system uses sonar probe to transmit and receive sound waves as the front end of the system detection. When working, the master control device controls the sonar probe to transmit a certain frequency wave, when there is a floating object in a specific area, the wave transmitting forward meets the obstacle and will be reflected to the sonar probe, the master control device can calculate the distance s from the sonar probe to the floating object according to the time difference t from transmitting to receiving and the propagation speed v of the wave in the water, and the properties of the floating object can be judged by analyzing the difference between the return wave and the transmitting wave. At the same time, the main control device receives the information returned by the sonar probe, controls the camera device to shoot down the image of the specific area, and transmits all the above information to the cloud through the wireless transmission device. The function of monitoring floating objects on the water surface of the river is completed.
 Smart City
Smart City
Self-Steering Pan-tilt Based on Sound Source Localization
PR013 »
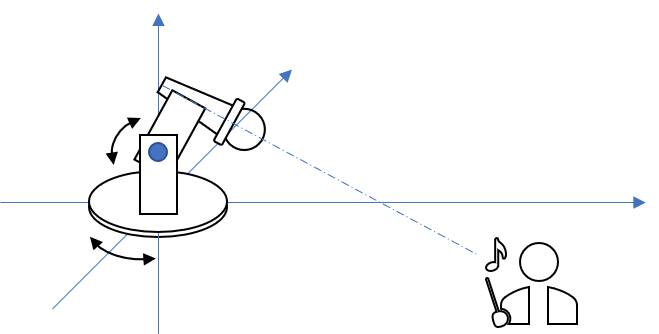
Cardioid directivity microphone has good performance and is used in many scenarios, but it has to adjust its direction when the sound source moves. Or in a videoconferencing system, the camera always need to point to the speaker. Sound source localization (SSL) technology will be used as a guidance to control the pan-tilt carrying the microphone or the camera or something else to point to the sound source. Echo cancellation (EC) and beam forming (BF) will be used to enhance the signal quality. SSL, EC and BF technologies will be developed in Intel FPGA configured with a microphone array. Analog Devices plug-in boards will be used to control the motors for pan-tilt adjusting.