 Food Related
Food Related
An FPGA-based Solution to monitor the Quality of Agriculture Produce
AP115 »
To minimize the losses that occurred during the storage process of farm produce (vegetables and fruits) by deploying sensor-based IoT technology to monitor and record essential and relevant parameters such as temperature, humidity, freshness indicators, etc.
This project will improve the profitability and customer satisfaction in the fresh produce industry and empower small-scale producers, shippers, and retailers with actionable data to optimize post-harvest inventory rotation and routing decisions.
 Other: SGP - Sustainable Agriculture
Other: SGP - Sustainable Agriculture
The Green Machine - Gardening for a Better Future
AP116 »
Our project aims to provide a smart, user-friendly, domestic mini-greenhouse management system to enable users to grow and efficiently monitor and tend to plants within their own homes. This encourages people to grow their own food plants by removing the difficulties related to gardening in the busy lifestyle.
Smart City
Intelligent Parking using Drone Surveillance
AP117 »
UAVs or Unmanned aerial vehicles have recently gained popularity for surveillance, the applications of which are gargantuan.
One of the major problems of various metropolitans are increasing traffic and scarcity of parking spaces.
Our project idea is to use the UAV for surveillance around various busy spots in the city and guide the cars to an optimal spot based on duration of parking and location.
 Health
Health
A Portable Device for Detection of Foot-and-Mouth Disease in Livestock
AP118 »
Design and Development of Machine-Learning Based Portable IoT-Device for Clinical Detection of Foot-and-mouth disease in Livestock
Often livestock in farms become affected by the Foot-and-Mouth Disease (FMD) due to poor maintenance. This is a highly infectious and sometimes fatal viral disease and poses serious issue to animal farming. The transmission of the FMD virus is possible before an animal has apparent signs of disease, and this aspect of low-detectability at early stages increases the risk of significant spread of the virus before an outbreak is detected. Further the FMD virus can be transmitted in many ways, including close-contact, animal-to-animal spread, and the carriers can be even inanimate objects, such as fodder and motor vehicles. The incubation period for FMD is 14 days. It is reported to be 1 to 12 days in sheep, with most infections appearing in 2 to 8 days; 2 to 14 days in cattle; and usually 2 days or more in pigs, with some experiments reporting clinical signs in as little as 18 to 24 hours [1]. This disease is still prevalent and the current approach to control the spread by large-scale culling results in adverse economic and environmental effects and is traumatic for farm workers and the public. The first major FMD outbreak in the U.K. in 2001 is estimated to have cost the country at least $6 billion, and another major outbreak happened in South Korea in 2010/11, with an estimated impact of about $8 billion. Though the livestock can be protected against FMD by vaccination, non-endemic countries do not vaccinate for FMD preemptively because of the cost of vaccination. However, they must be prepared to act at the first sign of infection. Hence, early detection of clinical signs of FMD is very critical.
We propose to design and develop a portable IoT device based on machine learning (ML) algorithm using FPGA platform that can be used in the preliminary investigation of clinical signs due to FMD. The typical clinical sign is the occurrence of blisters on the nose, tongue, or lips, inside the oral cavity, between the toes, above the hooves, on the teats and at pressure points on the skin. For training the ML model, currently available images of clinical signs of FMD and the corresponding diagnosis will be used for classification. After the model is trained, the portable device can be taken to the farm, and the images of the clinical signs of the suspected animal can be captured. Then the device will classify the diagnosis with a confidence score. Based on this, further investigations, if required, can be taken up.
[1] OIE Technical Disease Card: Foot and mouth disease, World Organization for Animal Health, Sep. 2021. [online]. Available: https://www.oie.int/app/uploads/2021/09/foot-and-mouth-disease-1.pdf
Autonomous Vehicles
Autonomous Vehicle Speed Control on Heterogeneous Road ways
AP119 »
Road accidents have been very common in the present world, with the prime cause being careless driving and exceeding the speed limit. The necessity to check this has been very essential and different methods have been used so far. However, with the advancement in technology, different governing bodies are demanding some sort of computerised technology to control this problem of overspeed driving. Although all highways do have signboards indicating the maximum speed limit for the sake of the driver’s safety, people still do not obey the highway speed limit.
In this project, the speed of the vehicle is controlled through a continuous scanning of the signboards indicating the maximum speed limit on the roads and locking the maximum speed of the vehicle to the scanned value. By making use of a camera mounted to the vehicle pointing towards the left side of the road, the signboard image is captured. The camera captured an image of the speed limit signboard that was processed on the FPGA board for character recognition by using the optical character recognition (OCR) method. This value is compared with the database to lock the speed of the autonomous vehicle. The complete information of the autonomous vehicle with respect to speed maintained throughout the journey is monitored remotely over the IoT cloud for further enhancements and speed updates along the route.
Even in some areas where we do not find any speed limit boards, especially for these situations, we came up with an additional feature that consists of data pertaining to the speed of different vehicles in different types of lanes are not unique and classified based on the type of vehicle and carriage ways. As an illustration, for carriage type motor vehicles with no more than eight passengers, the maximum allowable speed on an expressway for plain terrain is 120km/h, where as it is 70km/h on municipal roads. Through such data, we propose a speed control system for controlled autonomous driving on any type of road and any type of terrain. The vehicle in which this control method is adopted initiates the journey with tracking using a GPS tracker provided in it. At the start of the journey, the user can select his/her destination point based on the estimated distance as well as the type of roads involved a priori. It shows what lanes are included in that path and respective vehicle speed limits saved as reference. If the vehicle finds any speed limit signboard on the journey, it compares with the data available. The priority for the database of the lines and respective speeds is given when there is no signboard in the way of a vehicle. This ensures the continuous control of the autonomous vehicle in both online and offline situations for all types of roads.
Autonomous Vehicles
Autonomous Vehicle Speed Control on Heterogeneous Road ways
AP120 »
Road accidents have been very common in the present world, with the prime cause being careless driving and exceeding the speed limit. The necessity to check this has been very essential and different methods have been used so far. However, with the advancement in technology, different governing bodies are demanding some sort of computerised technology to control this problem of overspeed driving. Although all highways do have signboards indicating the maximum speed limit for the sake of the driver’s safety, people still do not obey the highway speed limit.
In this project, the speed of the vehicle is controlled through a continuous scanning of the signboards indicating the maximum speed limit on the roads and locking the maximum speed of the vehicle to the scanned value. By making use of a camera mounted to the vehicle pointing towards the left side of the road, the signboard image is captured. The camera captured an image of the speed limit signboard that was processed on the FPGA board for character recognition by using the optical character recognition (OCR) method. This value is compared with the database to lock the speed of the autonomous vehicle. The complete information of the autonomous vehicle with respect to speed maintained throughout the journey is monitored remotely over the IoT cloud for further enhancements and speed updates along the route.
Even in some areas where we do not find any speed limit boards, especially for these situations, we came up with an additional feature that consists of data pertaining to the speed of different vehicles in different types of lanes are not unique and classified based on the type of vehicle and carriage ways. As an illustration, for carriage type motor vehicles with no more than eight passengers, the maximum allowable speed on an expressway for plain terrain is 120km/h, where as it is 70km/h on municipal roads. Through such data, we propose a speed control system for controlled autonomous driving on any type of road and any type of terrain. The vehicle in which this control method is adopted initiates the journey with tracking using a GPS tracker provided in it. At the start of the journey, the user can select his/her destination point based on the estimated distance as well as the type of roads involved a priori. It shows what lanes are included in that path and respective vehicle speed limits saved as reference. If the vehicle finds any speed limit signboard on the journey, it compares with the data available. The priority for the database of the lines and respective speeds is given when there is no signboard in the way of a vehicle. This ensures the continuous control of the autonomous vehicle in both online and offline situations for all types of roads.
 Data Management
Data Management
R2A2: Runtime Reconfigurable Application Accelerator
AP121 »
With Moore's Law at its limits, one way of increasing compute capacity is Application Specific Hardware Acceleration; whereby a compute intensive problem is off-loaded to an Application Specific Processor - often called an ASIC - that leverages a specialized data-path to solve the problem much faster than a General Purpose Processor. (Examples are GPUs, Broadband Processors, AI acceleration chips etc.) Problem is, there can only be so many ASICs on a device deployed on edge. Also, ASICs are expensive to produce, and by nature, not reconfigurable.
The Goal of this project is to find a compromise between the expedient, but inflexible ASIC; and the versatile, but slow GPP. The R2A2 will use the Cyclone-V SoC, to realize a general-purpose, single-board, edge-deployable computer, which will run various compute intensive tasks of different resource load requirements. Depending upon the application running at a time, the R2A2 will configure the FPGA component of the Cyclone V SoC to act as an accelerator. This accelerator will be seen by Linux running on the SoC's ARM processor as a separate device, and a corresponding device driver, also loaded on the runtime will interface between the Processor and the FPGA.
By introducing runtime reconfigurable application-specific hardware, the R2A2 will help reduce carbon footprint by reducing global ASIC production requirements: This will eliminate potential e-waste down the years, while still providing high performance per-watt, which is desirable for computing on the edge. Also, high compute power on edge will lift bandwidth strain from the cloud/IoT infrastructure and reduce latency between the systems. Ideally, R2A2 will serve as a prototype for a plethora of Edge/IoT solutions utilizing FPGAs on SoCs for low cost, high flexibility, application specific operations.
Water Related
IOT based Smart Agriculture
AP122 »
The Continuously increasing demand of the food necessitates the rapid improvement in food production technology. In most of the developing countries, the national economy mainly depends on the Agriculture. But these countries do not able to make proper use of agricultural resources due to the high dependency on rain. Nowadays different irrigation systems are used to reduce the dependency of the rain and mostly the existing irrigation systems are driven by electrical power and manually ON or OFF scheduling controlled. The proposed system is usually designed for ensuring the proper level of water for growing up the plants all through the season. In addition, it provides maximum water usage efficiency by monitoring soil moistures at optimum level and it saves the electrical energy by turning off the motor when there is no water in the pump. The traditional methods are not efficient in controlling the illegal entry and it requires more labour work and time etc.
 Smart City
Smart City
Dumpyard Gas Monitoring System (DuGaMoS)
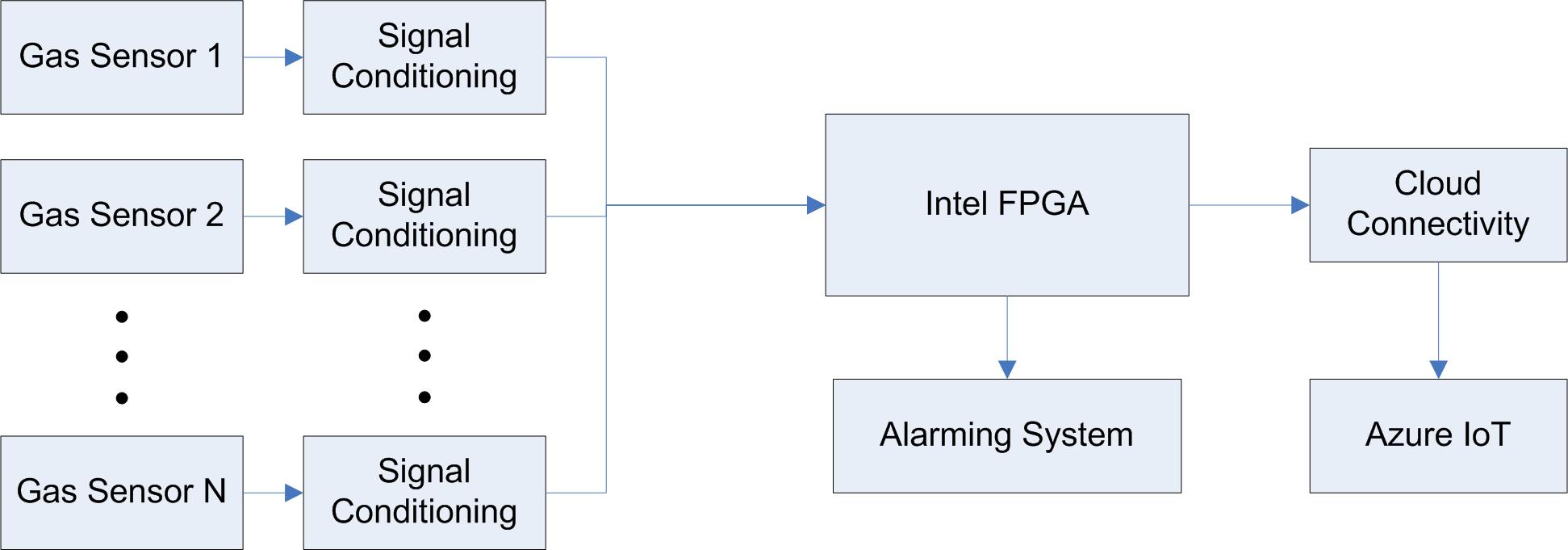
AP123 »
Existence of Toxic gases in huge dump yards and landfills has become a major concern in urban pockets. It leads to a lot of health issues, environment pollution and overall ecosystem damage. In order to address this problem we have come up with a solution of identifying or detecting the prevalence of toxic gases in these landfills. We propose to identify poisonous gases like Methane, Hydrogen Sulphide, Carbon Monoxide, Ammonia etc through an array of gas sensors integrated with Intel FPGA as the processor. Our target segment will be huge landfills and dump yards. We prefer to use Intel FPGA due to its parallel processing capabilities, extendable interfaces with several I/O ports, and high performance computing facility even with complex algorithms.
 Other: Agriculture
Other: Agriculture
Soil and Plant health monitoring through Smart Sensing and Monitoring System
AP124 »
Nowadays the major problems in Indian agriculture are small holdings, depleted soil and lack of easily driven systems to improve the yield at a large scale. In order to provide remedy for this issue,there is a need of a system which is easily accessible to monitor their plant health by providing data for their field conditions, humidity, pH level, water salinity and provide use full data about their plant. With the advent of recent developments in sensor technology and Embedded systems, its is possible to monitor the soil parameters and plant health. This research aims at providing assistance to the farmers for smart farming by developing smart IoT based real time systems for soil sensing and plant health monitoring. This proposed system measures the level of macro-nutrients present in the soil by using real time on the go technique. Further measured parameters are communicated to farmers in order to take decisions on water management, fertilizer utilization, crop selection and cultivation. In order to monitor the plant health ,the proposed system incorporates real time image acquisition and image processing techniques to detect the abnormalities on the surface of the leaves.
Smart City
Real Time and Low Power Smart Vehicle Tracker
AP125 »
Automatic Number Plate Recognition (ANPR) solutions are most an essential element of road safety and public transportation.
Deep learning computer vision is an effective approach to deploying ANPR.
And by computing all the required data at edge enables to achieve low power and near real time application
 Smart City
Smart City
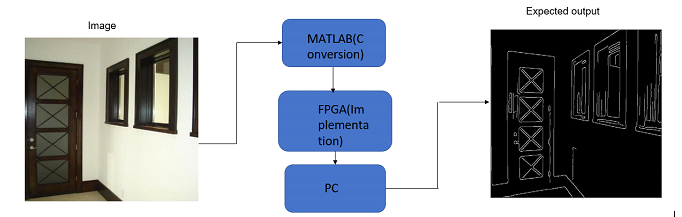
Efficient method for automatic detection of door through sobel edge detector using fpga
AP126 »
Image Processing in its general form pertains to the alteration and analysis of pictorial information. The objective of image processing is to visually enhance or statistically evaluate some aspect of an Image not readily apparent in its original form. This processing is used for convenience in order to reduce the complexity faced during the operations performed on an image. Edge detection is one such branch of image processing used to detect the edges of the objects in a picture by calculation the difference in brightness of that edge pixel with its surrounding pixels using gradient method. In this project, Sobel operator is used as a filter for detection of edges of projection of a door without further increasing the already complex process of image processing. This is done using MATLAB, Sobel filter and FPGA.