 Smart City
Smart City
smart home
PR015 »
智能家居控制系统,是以智能家居系统为平台,家居电器及家电设备为主要控制对象, 利用综合布线技术、网络通信技术、自动控制系统、音频技术等将家居生活有关的设施进行高效集成,提升家居智能、安全、便利、舒适,为我们的生活带来很的方便性。
Smart City
智能安防中的异常行为检测
PR016 »
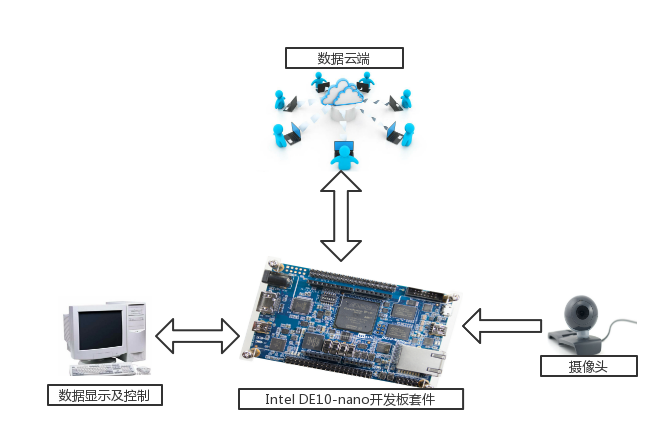
基于FPGA和云端计算的智能安防系统。
在数据端利用FPGA实时对摄像头采集到的图像数据预处理,然后将处理后的信息传入云端,利用云端训练好的AI模型中进行异常行为判断,然后将判断结果返回到FPGA数据端进行警示,报警等相关操作。
Smart City
基于FPGA的视觉SLAM实现及部署
PR017 »
采用FPGA计算SLAM算法中计算量最大耗时最多的图像特征点提取模块,对图像特征点的提取进行加速,然后将计算后的图像数据传入视觉SLAM算法中,使其具有更好的实时性和更低的能耗
Food Related
鲜茶叶分级系统设计
PR018 »
针对目前茶叶产业中的质量筛选问题,为了提高实际生产中的工作效率和准确率等,通过图像处理技术结合FPGA来设计一个能实现自动进行茶叶分级分拣的系统。
 Smart City
Smart City
桥梁裂缝动态监测系统
PR019 »
桥梁作为当今重要的交通枢纽,与行车的安全与畅通息息相关,它的正常运行能极大地推动经济的发展,促进社会的进步。随着时间的推移,外力的反复碾压及雨雪、洪水、冰冻、地震等这些自然因素的影响,必然会严重影响桥梁的安全和寿命,导致脱层和混凝土开裂,甚至会引发桥梁坍塌,造成不可挽回的经济损失和人员伤亡。
因此,及时检测并修复桥梁的已有损伤,保证服役桥梁在工作时的健康安全的状态,已经成为广大桥梁工程界研究者亟需解决的热门问题之一。由于裂缝是混凝土桥梁病害中破坏较为严重、威胁较大的一种,所以必须对桥梁裂缝进行监测,及时发现并修补,控制裂缝的产生、扩展,将其控制在合理的允许范围内,从而避免桥梁倒塌事故。
本系统针对桥梁裂缝的动态监测系统进行研究,采集桥梁上裂缝的微距图像并实时计算裂缝的宽度,同时监控桥梁上的行车情况,采用多传感器融合的方法,分析桥梁在各种荷载作用下,裂缝的开展和恢复状态,将其控制在安全合理范围内,为桥梁的安全运行服务。其意义有三:1)监测裂缝是否发生变化;2)监测桥上车辆行车状态;3)分析荷载对裂缝的影响。
Other: 智慧农业
智能盆栽系统设计
PR020 »
智能盆栽系统以FPGA作为硬件平台并辅以各类传感器实时监测盆栽的环境温度、湿度、土壤水分等参数,然后实时做出反应——自动进行浇水、通风等养护动作,以ESP-WROOM-02 WIFI 模块接入Azure IoT Central平台,让用户通过手机进行远程的检测和养护管理。本设计由监测端和控制系统两部分组成。监测端对周围的环境进行监测并采集数据,然后分析温湿度传感器、土壤湿度传感器返回的参数,并在LCD并行24位RGB接口的触摸屏上实时显示各个参数,监测系统实现了对植物生长的实时监测,可以随时查看植物的生长状况。控制系统具有土壤湿度过低时自动浇水的功能、温度过高时自动调节风扇转速的功能、温度过低时自动调节加热板温度的功能、光照不足时自动调节LED植物生长灯亮度的功能。最后,通过 ESP-WROOM-02 WIFI模块将数据上传至网络,接入物联网云平台中,在云平台上实现移动端的功能和界面设计,并在移动端上实现监测和控制的功能,达到远程控制的目的。智能盆栽系统可以视作智能农业大棚的雏形,可以尝试将应用领域扩展至农业以创造更大的价值。
Smart City
导盲小车控制系统设计
PR022 »
导盲小车控制系统设计是指通过导盲系统将周围环境中阻碍盲人出行的障碍物进行检测,通过语音提示盲人安全通过障碍物。导盲小车控制系统,运用超声波模块对周围环境进行实时检测,具有障碍物检测精准,检测效率高等特点,通过语音提示,帮助盲人安全外出。通过电子罗盘,告知盲人应当行进的方向。且结合了物联网+智慧城市的城市发展趋势,与了社会的发展相结合。同将红绿灯信息传给导盲小车,提示盲人安全的通过十字路口。
Health
便携式糖尿病患者饮食监测系统设计
PR023 »
1、光谱数据采集模块:便携式数据采集终端的关键是糖尿病患者摄入食物的近红外光谱数据,由于不同的物质分子结构不同,导致它们选择性吸收不同频率的近红外光,所以物质的近红外光谱中就包含着物质的组成成分等信息。针对糖尿病患者需要知道所摄入食物的含糖量这种情况,需要综合考虑常用的嵌入式技术,同时满足后续近红外光谱数据相应处理算法的精度要求。
2、数据处理模块:由于糖尿病患者饮食监测系统的数据采集终端便携性的要求,所以数据处理模块的选择应结合应用场景的实际需求,既要注意工作效率也要符合经济可靠这一标准。
3、光谱数据处理算法:由于待测物质的近红外光谱与其有机化合物的组成和其分子结构信息存在着对应关系,同时这种对应关系可以通过函数来近似表征。如果使用机器学习中的一些算法来建立起对应的数理函数模型,就可以通过物质的近红外光谱来得到物质的有机化合物组成和分子结构信息。但是针对糖尿病患者需要知道所摄入食物的含糖量这种情况,需要从常用的多元线性回归(MLR)、支持向量机(SVM)、主成分分析(PCA)和偏最小二乘法(PLS)等算法中找出适合本系统的光谱数据处理算法。
Health
高精度多路人体生理参数测量系统设计
PR024 »
本研究项目核心在于生理参数采集传感器的选择、信号调理电路设计、电源模块设计以及高速通信接口设计等关键技术环节,为此,提出如下技术方案;整个研究过程的技术路线如下:
1、针对市场上现有生理参数测量仪产品的功能特点,以及当前人体生理参数测量的相关研究成果,针对嵌入式技术初步确定高精度多路人体生理参数测量系统实现方案;
2、对基于FPGA技术的高精度生理参数测量系统进行硬件开发,包括具体的测量数量(包括心率、皮肤电反应、胸/腹呼吸、血压、动作和环境温湿度)的确定,相关生理参数采集传感器的选择,并针对各传感器进行模拟微弱信号调理电路的设计,电源电路的设计,高速通信电路的设计等;
3、对基于嵌入式技术的高精度生理参数测量系统的软件设计和实现;
4、设计用于显示、存储数据的上位机软件,以及高精度生理参数测量系统硬件和上位机软件联合调试。
 Smart City
Smart City
基于FPGA的智慧教室系统
PR027 »
随着无线通信、云计算技术、人工智能技术的不断发展和成熟,物联网被广泛应用于各个产业领域,建设面向智慧校园、智慧教室的物联网云平台在高校迅速发展起来。为此我们设计并制作了一款利用Intel DE10-nano现场可编程逻辑平台的智慧教室系统。本系统充分利用了Intel DE10-nano中FPGA与ARM的高速并行运算的优势,通过在Intel DE10-nano现场可编程逻辑平台上移植linux操作系统,在其中运用人工智能技术,将摄像头对课堂的实时监测画面进行AI算法处理。处理后将识别出当前课堂学生数量,每位学生信息,并通过识别学生动作,判断出学生是否举手,是否在睡觉,是否存在在玩手机等行为,最后将所识别信息通过intel FPGA Cloud Connectivity Kit即英特尔FPGA云连接套件上传到云端,帮助教师对学生进行云端监控,实现了教师维持课堂秩序的便捷管理功能。
Industrial
UAV Intelligent Recognition System Based on Deep Convolutional Neural Network
PR028 »
随着无人机地快速发展与普及,在带来便利的同时,也出现了越来越多的“黑飞”事件,给国家和公众都带来了安全隐患和经济损失。如何反制无人机非法入侵的问题越来越受到各国的重视,而快速精确识别无人机是实现反制的关键。与通过图像识别的方法识别无人机相比,通过无人机辐射的电磁信号进行无人机的识别具有更宽泛的应用范围和更高的灵敏度。无人机所辐射的信号中,无人机与操作手之间通信的飞控信号必然存在,因此识别无人机遥控信号谱图是一个有效的解决方案。民用无人机的飞控信号一般采用跳频信号进行通信。跳扩频信号属于非平稳信号,可通过短时傅里叶变换 STFT 方法,将天线、接收机采集到的多个时刻的信号变换成信号谱图。然后利用卷积神经网络(CNN)在图像识别方面的优势,实现精准识别。
本项目基于以上分析,考虑将信号多特征提取与识别的思想适用于工程实现的无人机检测与识别算法。采用基于神经网络的无人机遥控信号识别监测算法,通过联合自适应信号检测阈值计算改进现有的阈值计算方法,并通过预处理操作来对抗窄带与宽带干扰,最后利用神经网络识别是否存在及其机型。借助 FPGA 高速处理性能,对算法进行流水线设计,完成了一套具有实际工程意义的无人机检测与识别系统,该系统具有库内多架无人机检测及型号识别,以及库外无人机检测功能。
 Other: 智能农业
Other: 智能农业
智能农业温室大棚监管系统研究
PR029 »
本设计基于物联网的三层架构:感知层、网络层、应用层,构建农业温室大棚监控管理系统,通过多种传感器实时感知农业温室大棚内部环境参数;通过WiFi将各个节点采集的数据上传到服务器;用户通过手机即可实时了解到大棚内部情況,并可进行远程设备控制。