 Transportation
Transportation
Renewable Energy Mover
EM011 »
Renewable energy Mover :- this project utilizes three Renewable Energy Source ( electricity, solar and wind energy ) to create a robust smart energy distribution system. The project focus on design of drone based vehicle which utilizes the three energy alternately to store energy which can be transported to any region in the world regardless of energy distribution barrier. It is of great excellent as it does not depend on a single energy source ,this made it to be in energy service regardless of environmental factor as a certain energy source (either wind, sun or electricity) will always be maximally efficient at a particular period of time in a season. This project is design to create a vehicle that is smart enough to use the maximal energy source at a given period , store the energy and as well as transporting them. the with use of IOT to self driving can be implemented, AI to make use of weather forecast to locate and trap where renewable energy is maximally present.
 Autonomous Vehicles
Autonomous Vehicles
Orthogonal Recurrent Neural Network on DE10-Nano (ORNN Nano)
EM014 »
In this project, we aim to train a quantized orthogonal Recurrent Neural Network (ORNN) model for speech recognition and implement its inference accelerator on DE-10 Nano using intel HLS. With an era of increased use of AI to facilitate our lives speech recognition at the edge has numerous advantages. From a tiny personal assistant in our phone to the autopilots of self-driving cars, speech recognition has shown impressive performances and has contributed to assisting our lives and making it much easier. Similarly on the other hand having a speech recognition model (which is compute and memory expensive) on an edge device like DE-10 Nano allows us to explore the potential of the Altera FPGAs and to be able to deploy such technologies (e.g., bigger speech recognition model such as conversation bots) offline with a huge power savings (thanks to the configurable architecture of FPGAs). This allows us to integrate and explore the potential usage of edge devices (like DE-10 Nano) in autopilots. Moreover, the orthogonal RNNs are the choice of our project because they have the capacity to learn long-term dependencies like LSTMs but have a much lower parameter count.
What potential expertise do I have to complete this project successfully?
I (Ussama) have 4+ years of experience in working with efficient quantized training of deep learning models i.e., MLPs, CNNs, GANs, RNNs, etc., with a research internship at Xilinx on the same topic. Currently, I am an MS/Ph.D. student at KAUST working at the intersection of Deep Learning and embedded systems i.e., “Edge AI”. Have a detailed look at my LinkedIn (https://www.linkedin.com/in/ussamazahid96/) and Hackster.io profile (https://www.hackster.io/ussamazahid96) which also features my winning project i.e., “Quad96”.
 Smart City
Smart City
Turkey: Smart Garbage Containers to Reduce Fuel Consumption Caused by The Frequency of Solid Waste Collection
EM018 »
The aim of this project is to reduce fuel consumption in the waste collection process, with smart garbage containers. Smart garbage containers will send the waste bin fill-level information to the cloud, and the garbage collection vehicles will reschedule and optimize the waste collection route. In this way, garbage collection vehicles will not enter the areas where unfilled containers are located, so unnecessary fuel consumption will be prevented. Smart garbage container also detects the temperature and gas emissions that are above normal by its sensors and send a warning so that threatening garbage can explosions can be detected and prevented in advance. The fill-level of the smart garbage containers is detected by the distance sensors in the garbage container. The sensor measures the distance between the cover and the wastes. When the measured distance falls below a certain level, it sends the information to the cloud that it is full. Volatile Organic Compound Gas detector will be used to measure methane gas emission, and a thermocouple system will be used to measure temperature.
 Water Related
Water Related
The smart irrigation system that reduces water use in agricultural areas
EM020 »
Introduction
Since only 3% of the world's water is usable by humans and other living things, it is necessary to be more sensitive in this regard. According to the article published by Worldbank in 2017, it was mentioned that approximately 40% of the world's population lives in water-restricted areas, and it is estimated that approximately 1.8 billion people will live in areas without water by 2025 [1]. Therefore, we should use water resources more efficiently. Abundant use of water in agriculture will create major drought problems in the future. According to the Worldbank, a 60% increase in agriculture is required to feed 9 billion people by 2050, which will increase water use by 15% [1]. According to the CUESA (Center for Urban Education about Sustainable Agriculture), it is mentioned that in order to prevent excessive water use in agriculture, farmers should monitor the weather conditions regularly, while at the same time, the moisture level on the soil and plant should be measured continuously. It is stated that a system to be created by monitoring these values will save water usage [2].
Project Design
In our project, we are planning to develop a system that will reduce water use in an agricultural area. While this system will constantly measure the moisture content in the soil, it will also have a structure that will stop the irrigation system from working in case of rain. We will use the CN-0398 coded soil moisture measurement system to measure the humidity level. In addition, we will check whether it is raining with the HL-83 rain sensor. We plan to reduce unnecessary water use by combining these two systems. After analyzing whether the soil needs water or not, we plan to control the irrigation level by sending the necessary data to the cloud system with the ESP8266 Wi-Fi module in order to analyze the last year’s data. We aim to make a measurement every 10 seconds by the system and to send information about the analysis made according to these measurements to the cloud system in less than 5 seconds. Analyzes will be made with the DE10-Nano Kit.
Expected sustainability results and projected resource savings:
The threat of extinction of the world's waters is a very important problem for sustainability. We think that this project will make significant contributions to sustainability. According to a report published in Nature World News, 30% to 50% water savings were made with the smart irrigation system [3]. We plan to save at least 20% of water in irrigation in agriculture. We believe that thousands of tons of water can be saved if the system is started to be used actively in agricultural areas.
References:
[1] “Water resources management,” World Bank. [Online]. Available: https://www.worldbank.org/en/topic/waterresourcesmanagement. [Accessed: 19-Sep-2021].
[2] “10 ways farmers are saving water,” CUESA, 30-Jun-2021. [Online]. Available: https://cuesa.org/article/10-ways-farmers-are-saving-water. [Accessed: 22-Sep-2021].
[3] M. Brown, “Smart irrigation System 'listens' to Plants cries to reduce water use up to 50%,” Nature World News, 03-Sep-2021. [Online]. Available: https://www.natureworldnews.com/articles/47332/20210903/responsive-drip-irrigation-irrigation-system.htm. [Accessed: 23-Sep-2021].
 Other: Agriculture
Other: Agriculture
Mini Electric Vehicle Reducing Waste In Agriculture
EM022 »
With the development of technology in agriculture, clean water and fertilizer etc. There has been a reduction in wastage of products. However, a large amount of waste is still experienced today. In order to prevent this even a little bit, we designed a mini electric vehicle project that works with solar energy and does not harm the nature.
The designed tool takes a piece of soil sample and determines its humidity, pH ratio, mineral ratio etc. in it. By making the analysis, it transfers it to the user and automatically starts the irrigation system as much as the water needed by the soil. In line with the deficiencies, if the fertilization process is done manually, the farmer will only apply the necessary pesticides.
Smart City
Agrocision ( Agriculture and precision)
EM026 »
PROBLEM
Farmers are receiving less yields than expected because they are subject to the unpredictable climatic changes which is resulting in Zimbabwe importing food and slowly losing its bread basket status.
SOLUTION
Agrocision offers farm management using information technology to ensure that plants, animals and the soil receive exactly what they need to foster optimum health and productivity through analyzing and reacting to data gathered from inter and intra-field variability of crops.
Target Market
Large Scale and Small-scale Farmers in Zimbabwe.
Industrial Effectiveness
Agrocision will help the government in implementing industry 5.0 in the farming sector as the system uses Internet of Things (IOT) and it will also be effective in paving way for Smart Cities.
Economic Feasibility
Agrocision will be available in two modes, outright purchase and subscription to curter for everyone.
Approximate Budget for one unit: USD $1500
Expected Breakeven: After 20 units
Expected Timeline: 2 Months
Food Related
Adaptive Greenhouses
EM027 »
Our project aims to update the current greenhouse infrastructure in order to make it more resilient against the new challenges of climate change, all keeping the cost low in order to update existing infrastructure intead of replacing it, minimising the impact on local farmers and their communities
Data Management
Reconfigurable matrix co-processor
EM029 »
The device is a co-processor that accelerates matrix operations. Its design supports the completeness of matrix algebra, which was proved in the research of hardware and software complexes. This completeness is provided by the isomorphic mapping of vector algebra to the matrix one. Vector algebra was chosen because of intuitive implementation of the one vector with fixed length computation in hardware without significant costs. The description of matrix algebra through vector`s one allows to provide full support of matrix algebra. As the signature operations were chosen the operations of primitive-program algebra (PPA), which are commonly used in programming.
In the co-processor`s architecture is used the logical-subject principle, according to which control and executive parts are separated and connected by forward and backward connection. To support isomorphic mapping, a special block is used – Isomorphism Support Unit (ISU). Its goal is to calculate addresses and control operations on vectors. In addresses calculation the counters are used. And for the work of the entire unit the responsibility is brought by the special control structure, which is described by the logical equations for the control signals. All this allows the programmer not to worry about the implementation of matrix computations. The programmer works directly with Control Unit (Ctrl Unit) of the entire co-processor. The Ctrl Unit supports all PPA operations as it is based on the RISC architecture.
Input-Output Unit (IO Unit) contains modified multi-lines Serial Peripheral Interface (SPI) in half-duplex mode. The interface besides SPI`s standart control signals, such as synchronization signal and device selection, has also the interrupt signals from the co-processor. And the data bus uses multiple lines to transfer the data fast. IO unit has a counter that calculates the memory address for reading and writing, it allows to work independently of the Ctrl Unit. In order to get and access the co-processor`s memory a special key should be given. If the given access key is incorrect, the address counter will be switched on timer mode. The access to the co-processor is denied until the counter will be overflowed, then an access key should be given again. For the correctness of the operations and description of the software interface is responsible for the control scheme, which is described by the transition diagram of the state machine. All transitions occur at the rising edge of the synchronization signal.
The project uses partial cells reconfiguration. Namely, for control circuits of IO Unit, ISU and decoding schemes of instructions in Ctrl Unit. Reconfiguration of ISU control circuit allows to declare new operations and change the old ones. Reconfiguring IO Unit`s control circuit allows to change the software interface. And change the decoding scheme - the instructions themselves. Also, the parameterization of the co-processor allows to adapt it to certain limitations of the different FPGA chips.
One of the main reasons for using FPGA is the use of partial cell reconfiguration, as this technology is one of the main advantages of FPGA. Parameterization of the co-processor allows to implement it on a wide range of devices. Also, parts of the co-processor are used as blocks in the Platform Designer tool, which will allow them to be used in other projects.
 Other: Smart city + food related
Other: Smart city + food related
Smart garden
EM030 »
It is about how we have a good garden , how we have healthy food, and how we do them in smart manner .
 Smart City
Smart City
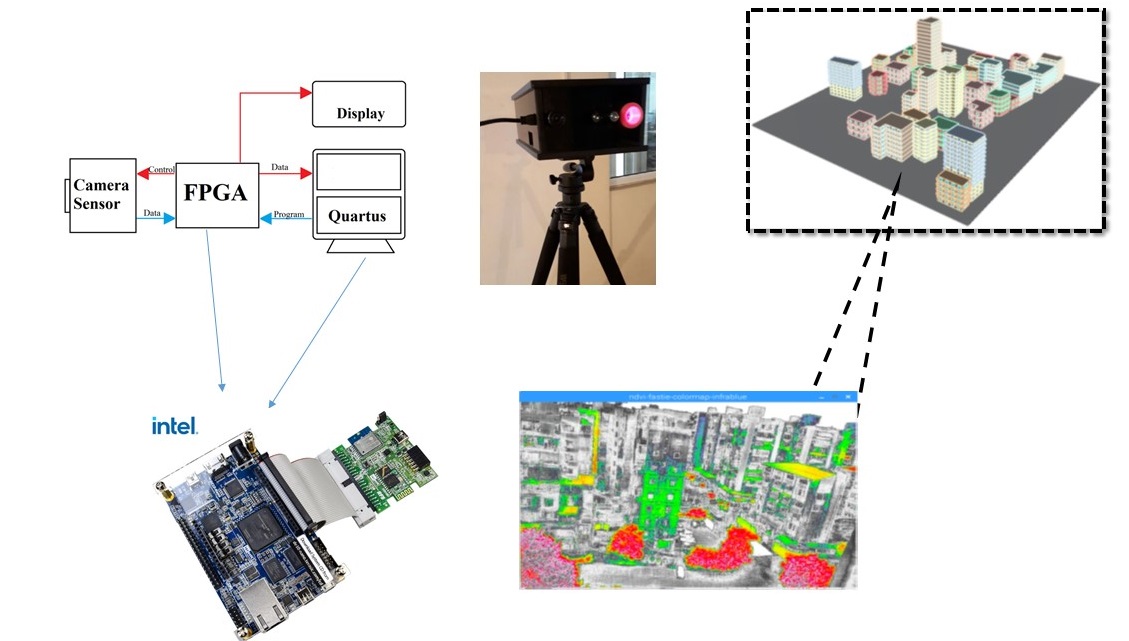
NDVI device for building building monitoring
EM031 »
We have developed a platform to measure and visualize Normal Difference Vegetation indices using a low cost Camera and a DE2 board. This device was tested on building facades showing building moisture that can be related to the inhabitant health. In a different project we have studied around 17000 buildings in Beirut to build and energy model, the simulation was run on Azure. In this proposal we try to merge the two concepts/techniques.
 Autonomous Vehicles
Autonomous Vehicles
Gesture Recognition Accelerator
EM032 »
Nowadays, the number of network-based devices (IoT
devices) has been increasing. They can be controlled by
other network-based smart devices such as smartphone,
personal computer or personal assistant robots, and so on.
These systems or devices should have user-friendly interface design. In this project, we propose easy-to-use and
intuitive user interface design for them. We employ gesture controlling UI.
 Industrial
Industrial
SoC design for enhanced keyword spotting applications with eliminated resources
EM042 »
It is aimed to deploy a combined Machine Learning (ML) system based on both FPGA and HPS units of DE10-Nano platform that will be enhancing the capabilities of a keyword spotting (KWS) application. The KWS will be executing at HPS as a low power application targeting limited resources requirements. Together, the required peripherals, such as the microphone input will be handled. The design in the FPGA will be incorporating neural network (NN) models, responsible to enhance the quality of the speech signal by removing environmental noise. Hence, features extraction will be more accurate and the demands in KWS application can be eliminated to reach low power, low size implementation without compromising the performance of the detection.